AMAZON multi-meters discounts AMAZON oscilloscope discounts
The gain-only controller is also called the proportional-only controller. The calculations in the previous table show several inherent problems with gain-only control. First, the PV will never reach SP because the error is continually getting smaller as the temperature inside the furnace gets closer to the SP. This problem can be overcome somewhat by changing the amount of gain (multiplying factor). The next table in Table 1 shows the results if the gain factor is changed to 4.
| SP - PV = Error | Error x Gain = Output |
100°F - 75°F = 25°F |
25 x 4 = 100% |
| 100°F - 80°F = 20°F | 20 x 4 = 80% |
| 100°F - 85°F = 15°F | 15 x 4 = 60% |
| 100°F - 90°F = 10°F | 10 x 4 = 40% |
When the gain is doubled from 2 to 4, the output is also doubled for each calculation. Remember, if the sample time for the controller is set for 1 second, the controller is making a new calculation every second. For simplicity, the values in the table only show the calculations at intervals of specific error points. The numbers in the table show the progression of the changes in the output due to the action of gain. To start this process the technician makes the changes to the SP in the controller. This change in the SP is called a bump. The word bump does not sound too technical but it's very descriptive since it refers to any change in the SP or PV. If the technician changes the SP, it's called a bump, and if the door to the furnace is opened and the temperature drops 10°F it's also called a bump. A bump may be thought of as any disturbance to the PV or the SP. When the technician bumps the SP from 75°F to 100°F, the controller will begin calculating the output using the new gain of 4. Notice that the output is initially set to 100% this time and the heating element will supply the full amount of heat. As the PV indicates the temperature is increasing, the output is also reduced more quickly because of the increase in gain. The result is still the same. The gain-only controller can't get the temperature to the SP. Each time the gain is increased, the controller will get the PV closer to the SP, but because the output is always reduced when the error gets smaller, the controller will always tend to level out before the process temperature reaches the SP.
If the gain is increased, the amount of output is increased for each change of error. This trend is useful to a point. ill. 1 (below) shows the result of increasing the Gain in the form of several graphs. The first graph shows the original PV for the system and the response of the PV as the output is changed when the gain is 5. The second graph shows the response when the gain is increased to 10, and the third graph shows the response when the gain is increased to 15. From these graphs notice that each time the gain is increased, the PV will get closer to the SP (dashed line). But may also notice that as the gain gets larger, the PV temperature begins to oscillate.
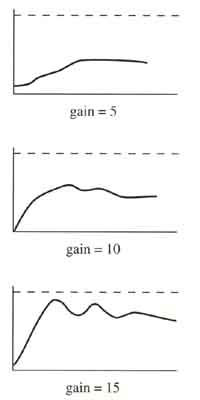
Above: FIG 1: Three graphs that show the response curve for the heating
system with gains of 5, 10, and 15.
When the controller causes the system to oscillate, the PV temperature will actually go up and down. At first, as the gain is relatively small, the oscillations will be small, but eventually as the gain is increased, the system will begin to oscillate and the process temperature will surge above the SP and then well below the SP. ill. 2 (below) shows the results of too large a gain as the PV temperature oscillates out of control. Since the temperature at the top of the oscillation is well above the SP, and the temperature at the bottom of the oscillation is well below the SP, this type of control isn't only unacceptable, it's also dangerous. The oscillations will continue to grow larger if the gain is increased or they will diminish if the gain is reduced and the PV will end up short of the SP.
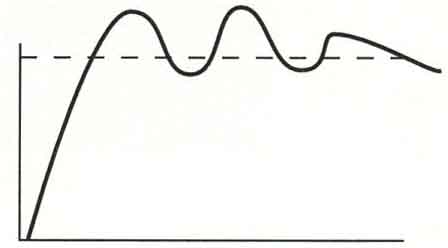
Above: FIG 2. Graph of large oscillations caused by the gain value becoming too
large.
The following four statements can be made about gain-only (proportional only) control:
1. The PV will never reach the SP.
2. The larger the gain is, the closer the PV will get to the SP.
3. As gain is increased, the PV will oscillate more.
4. As gain is increased, the system will reach a point where the PV will oscillate out of control.
PREV: Using Gain for Control
NEXT: Using a Gain-Only Controller