AMAZON multi-meters discounts AMAZON oscilloscope discounts
The jointed spherical robot is a more specialized spherical robot. It's also called an articulated arm robot by some manufacturers. One of the early articulated arm robots was called selective compliance assembly robotic arm (SCARA) robot. ill. 1 shows a picture of this type of robot and ill. 2 shows a diagram with an outline of the robot's work envelope. From the image notice that the waist axis is taller than one on a spherical robot, and the upper arm has a shoulder axis. These two changes allow the robot to reach higher in the work envelope, and lower to areas that are directly in front of itself. With the addition of a three-axis wrist, this type of robot is very useful in welding, painting, laser cutting, water jet cutting, gluing, and other applications that require a great deal of articulation (tight movements).
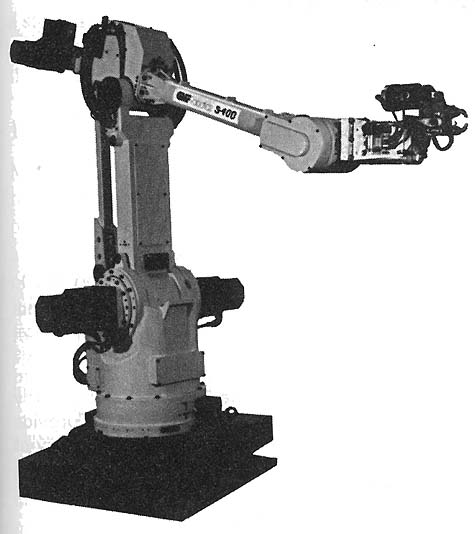
Above: ill.1 Picture of a jointed spherical robot.
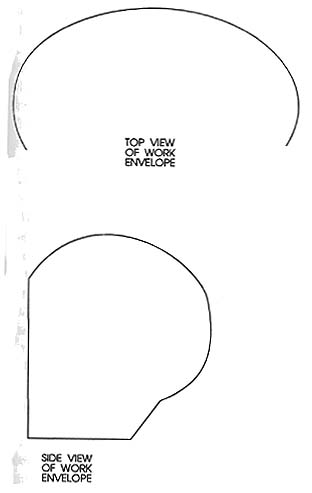
Above: ill.2 Diagram of a jointed spherical robot
with a top and side views of its work envelope.
Notice that the jointed spherical robot has three large axes: The base, waist, and upper arm will provide the large or gross movements. And the three axes in the wrist (pitch, roll, and yaw) provide the fine motion. The combination of the two sets of axes allows the robot to travel large distances quickly, and then precisely drill a hole, or place a weld strategically. This has become the most widely used type of robot because it's so adaptable to a variety of applications. It's also easy to make changes in the application once the robot is in place. ill. 14-10 shows an example of the three large axes (labeled arm sweep, shoulder swivel, and elbow extension) and the three fine axes (labeled pitch, roll, and yaw). The large axes represent the same movement that a human body makes with the waist, upper body, shoulder, and elbow, and the three fine axes represent the same movement the human wrist makes.
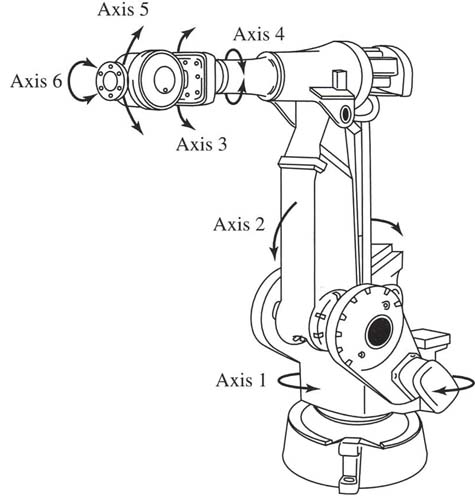
Above: ill.3 The large (gross) motion is controlled on
the jointed spherical type robot by Axis 1 (base motion), 2 (waist motion), and Axis 3 (upper arm motion). The fine motion is controlled by Axis
4, Axis 5, and Axis 6 which provide wrist roll, pitch, and yaw.
The base allows the robot to rotate or swivel in approximately 300°. The waist allows the robot to bow or bend at the waist like a human. This provides the motion needed to reach points that are on the floor. The upper arm is similar to the human upper arm where the arm is attached to the shoulder. This axis allows the robot to reach upward and , combined with the waist, to reach low points in the work envelope.
The pitch, roll, and yaw movements of the robot wrist allow the robot to manipulate small tools or grippers into very small work spaces, providing movement similar to the human wrist.
| Top of Page | PREV: Spherical Robots | NEXT: |