What they are and how they work.
The fascination, awe, and sometimes even fear that surround the subject of robots probably center on the idea of creating artificial life. The potentially threatening and uncontrollable consequences of this possibility have been the theme of many books, plays, and horror movies, of which the first well-known example is the man-made horror of Dr. Frankenstein's monster.
Two notable exceptions to this grisly tradition are the fiction of Isaac Asimov, and the recent series of science-fiction movies, beginning with Star Wars. In that movie robots are shown as lovable friends and loyal companions. And in Asimov's stories, the robots are programmed in accordance with the idealism of Asimov's three Laws of Robotics. These are:
(1) A robot may not injure a human being, nor, through inaction, allow a human being to be harmed.
(2) A robot must obey all orders given by humans, except when they conflict with the First Law.
(3) A robot must protect its own existence unless that conflicts with the First or Second Laws.
In the real world, of course, mankind is in little danger from rebellion by neurotic robots, and that's not likely to change for several centuries. That's because robots we can build won't be smart enough for a long, long time. The reality of modern computer science, as it applies to artificial intelligence and robots, is that machines have very primitive intellectual capacities, as well as very low-level motor (motion) capabilities. Despite recent advances in modern computers and artificial intelligence, the sensory perceptions, the decision making, and the intellectual capacities of robots remain far interior to humans, and will continue to remain so for the forseeable future.
What Is A Robot?
There seems to be some confusion as to the exact definition of robots, so let's clear that up here. This is important, since there are key differences between a true industrial robot (IR) and other mechanical human-like (or semi-human-looking) "robots." The word robot is described in the dictionary as coming from the Czech word robotnik, which means serf or slave, or from robata, which means compulsory service. A robot is thus defined as a machine in the form of a human being, which performs some mechanical motions of a human, but which lacks human thoughts: emotions, etc. It is also defined as an automatic device which performs things ordinarily done by humans, operating with what appears to be semi-human intelligence.
Man's fascination with machines that move under their own power and some kind of internal control is as old as recorded history. The Egyptians are said to have built water clocks and figures which moved their hands, arms or head, as early as 3000 B.C. The ancient Greeks, Ethiopians and Chinese built statues and figures that acted out sequences of human-like motions, powered by falling water. And in the late seventeen hundreds a team of Swiss craftsmen (precursors of Swiss watchmakers) built lifelike automata that could write, draw simple pictures, and play musical instruments.
Not Human-Like
Most people know that real, working (useful) robots are not human-like automatons -machines than can walk, talk, think, and do human tasks better than humans. Real robots are machines which do many specialized jobs better than humans can do them, without getting tired and while making fewer mistakes.
Before the idea of robots was dreamed up, there were automatons, which were automatic, people-like (or animal-like) machines. Most were doll-like figures with clockworks which let them turn their heads, bend over (bowing), open and close their eyes and/or mouths. Some could even write words on paper, and Thomas Edison put tiny phonographs in dolls which could then recite, "Many had a little lamb." These were curiosities or toys, of course, and the word "automaton," meaning automatic machine, was apt for them.
But in 1920 the play R.U.R. (Rossum's Universal Robots) was produced in which the author had an inventor named Rossum (which means "reason" in Czech) create automatons to do much of the world's daily work. His Robots were intended to improve life for humanity by freeing man from drudgery, but they rebelled, killed the humans, and started a new race themselves. The word robot replaced automaton, and came to represent (in most people's minds) man-like machines.
For years the long-sought goal of machines which could serve as human-like workers has persisted, but until modern electronics especially the transistor (in the Fifties) and later the integrated circuit arrived, such machines were only fantasy.
With the development of micro-electronics in the Sixties and Seventies we can finally build robots to do much of man's most demanding, boring, and/or dangerous work on production lines in modern factories.
Man-Like Robots
The only robots which resemble humans, at least so far as having a "head", and often also two arms, are recreational robots or personal, toy, or demonstration robots. These are not practical for doing useful work, which is what industrial robots do. Industrial robots are hard at work day and night (they never have to sleep) in automobile factories in Japan and the US as well as other countries. There are over 300,000 IRs in factories of all kinds now, with thousands more being installed every month.
Japan leads the world in the number of IRs installed and at work with the US, West Germany, Sweden, France and Italy next.
In addition to working (industrial) robots, there are also demonstration "robots," sophisticated toys or learning tools. They will be discussed in this article, but the important robots of the future (which are here today) are programmable machines which can do jobs formerly done by humans, but now, or soon, are better done by machines.
In the last two years microcomputers and microprocessors, which are the heart of micros and robots, have begun to outnumber human beings.
That's right, there are beginning to be more of them than there are of us! I'm not talking about intelligent electronic beings, of course, but about obedient electronic servants. Most of them are small special purpose computers, such as are used in automobiles for controlling ignition, microwave ovens and other appliances for controlling their operation, and of course, microcomputers, (micros from here on) which are desktop or smaller general-purpose computers, for home, business and entertainment.
By the late Eighties it's estimated that over half of all workers will in some way be involved with computers and robots either using them or working on them or designing them or fixing them. Computers will control most of the machines doing mass production, and even most service-related work. Yet by the beginning of 1984, less than ten percent of the children in the US had taken any computer-learning classes.
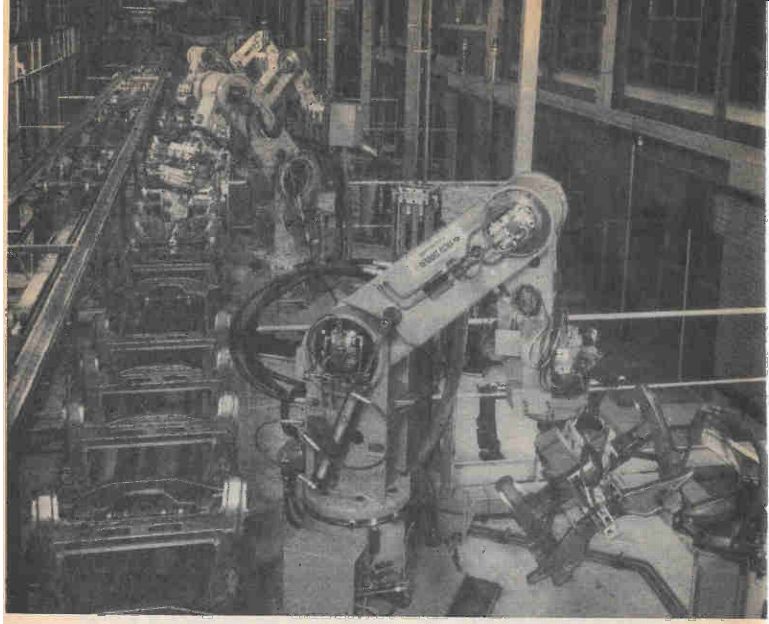
----- Industrial robots work mostly on production lines assembling,
welding, painting and finishing cars, refrigerators, and parts for them
and other precision machinery.
Keeping Ahead
People who are at home with computers and robots (especially how to design and/or fix them) will be in better shape to get ahead and stay ahead in the coming world.
In the years ahead people without some familiarity with computers, at least using the keyboard to put data in and get information out, will be in worse shape than an illiterate of the 1950s up to today. You will have to be at least slightly computer-literate in the years ahead, as jobs shift more and more to controlling the machines that do the real work.
It's estimated that there are now over a billion microcomputers world-wide, of which at least 14 million are home/business micros. As time goes on there will continue to be more and more small computers serving us in ever more ways and controlling (under our supervision) the work of production, and of our daily lives.
Industrial Robots
All IRs have arms which can be manipulated, and at the end of each arm is a gripper (elementary hand). Such robot arms may be pick-and-place machines, moving objects from one place to another. Assembly robots place one or more items into another, and welding robots and painting robots are widely used on assembly lines.
We call them robots if they do jobs humans used to do, or still doing. Robotlike means doing a job mechanically, as though a machine were doing it.
Most people know that robots are already used in producing cars in Japan, and here is the US the major car makers are rapidly converting much of their production to include robots in their assembly lines. Industrial robots are taking over much of the drilling, welding and painting, and soon will be doing much more complicated jobs they've been developed for in other manufacturing processes all around the world.
Not only cars and kitchen appliances, but transistor radios, digital watches, and nearly all processes which involve mass production of precision appliances are now being robotized, or will be soon.
The Robot Brain
All robots have electronic brains. That is they are run by microprocessors, which are the controlling part of microcomputers. Generally, a robot will have a microcomputer for its brain, receiving input signals from its "eyes," its "ears,", and other sensing parts, such as its sonar (distance-measuring sense). This microprocessor is similar to and, often exactly the same as the CPU (central processing unit) of a microcomputer, which we call simply a micro.
Although such a robot "brain" can be extremely sophisticated, taking in continuously-changing information from its "senses" and directing its "feet," usually wheels if it's a mobile robot, or more often its arms (most have only one). Its brain is still much less complicated than our own brains. It works only by digital switches, millions of On and Off switching, which is digital counting. The robot's brain takes in information, either from its senses, or from a preprogrammed tape or other memory. It then does things depending on what the input information tell it to do. These things are most often picking something up, moving it, painting it, welding it, drilling it, and/or replacing it somewhere else.
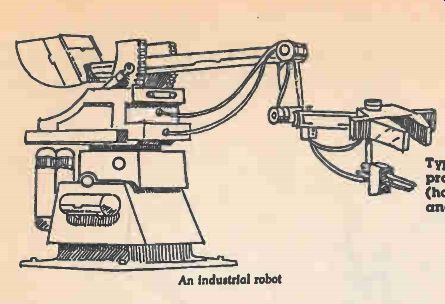
-------- Typical industrial robot is fixed in place on a production
line and only moves its arm, its gripper (hand) and its trunk. This robot
has both a gripper and welding electrodes, below its gripper.
Small industrial robots are already used widely to sort small objects, to pick them up and place them into larger assemblies, and for dozens of other dull, simple, repeated tasks. Robots can be used for any job which is repeated enough to make it pay by replacing a human's work. Some robots are already doing jobs which are dangerous for humans, and they will continue to do more and more of them.
Intelligent Robots
If a robot is to do a job which depends on varying conditions, it must receive information from the outside world. This is called self-intelligence, and provides a robot of greater complexity.
Although robots can be made to move around, it will be a long time before moving robots will do very complicated tasks. Most moving robots are just for demonstration, or for learning about robots and computers. One such robot is the one sold by the Heath Company (both as a kit and factory assembled).
Robot Carts
Some police bomb squads have a remote mobile manipulator which can safely examine and transport suspected bombs. Robotlike prison guards have been developed and may be in use in some institutions before long. They're even under discussion for use elsewhere. Robot exploration machines have been built at enormous cost, and used on the moon and Mars.
These are part robot (they can move about independently) and partly under the control of remote humans who observe the robot's surroundings via long-distance TV camera. Underwater robots have explored the ocean floor, including the wreck of the long-lost ocean liner, The Titanic, bringing back memorable pictures of its empty (for 72 years!) ballroom on the 2-mile deep ocean floor.
What Machines Are Robots?
Machines such as tethered submersibles, or bomb carts are obviously not real robots. They are extensions of human operators. Other near-robots include remote "manipulator" arms, prosthetic arms and legs, etc. None of these devices can operate on their own. They need direct human control and supervision. It has been suggested that, "A real working robot must be autonomous and independent; at least partly free of external control from a human operator. It must be a general-purpose device that, at different times, can do different jobs. To do these things requires that the robot be controlled by a programmable computer." In addition a true robot must imitate one or more human senses, most obviously touch, vision, and hearing. It must be able to respond to external sights, sounds, or physical objects, as well as operating under internal (computer-directed) commands.
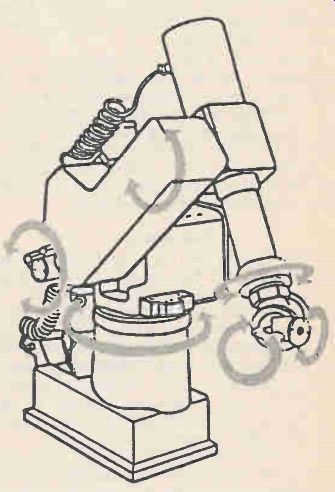
------ This heavy-duty industrial robot is a Cincinnati Milacron robot
fixed in place on a heavy pedestal.
Arrows show the possible motions of the pedestal, the upper arm, the forearm, the wrist, and a mounting plate for the end effectuator.
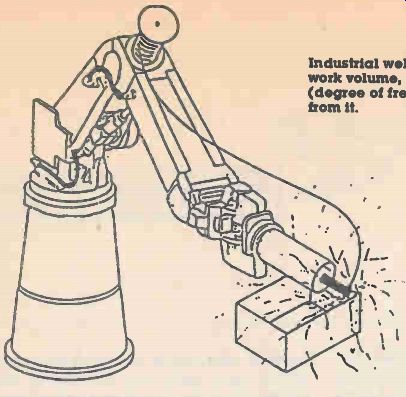
----- Industrial welding robot shown here has limited work volume, can
only move in a few directions (degree of freedom) toward its work or
up, away from it.
As a result of these requirements, a true working robot must interact with its surroundings by receiving information (seeing, hearing, and/or touching). And it must be able to act (react) in this environment. Simple examples are avoiding an object when moving, or picking something up and placing it some (specific) place else.
In other words, a real working robot must be under computer control, and it must have senses. This would appear to rule out robot arms, which are the most widely-used robot machines (in car and other factories), as true robots.
To recap, most of today's "robots" are not true, fully-functional robots. But they do work. Other "robots" (toy, hobby, educational, etc.) are not "real" robots. Robotics and computer intelligence are rapidly advancing, as integrated circuits (ICs) get smaller and smaller (thousands of transistors and other components on tiny chips). Microcomputers will get stronger and stronger, making it possible to do more complicated jobs with robots.
Real Robots
Industrial Robots can be programmed, using the microcomputer each has, to obey complex instructions, and alter their operation to adjust, when needed, to changing circumstances. They do jobs like lifting, moving, or turning things over. They paint, weld, polish, deburr, and otherwise finish rough metal pieces, and load and unload individual pieces to or from bins, pallets, or other containers. Nearly any repetitive work can be done over and over by robots, freeing human production workers form boredom, fatigue, and often dangerous work.
Most of the robots in existence now are an outgrowth of automation (automatic machines) which started in the Fifties, and became established widely in many factories in the Sixties. The programmable robot--as distinguished from a control system built into the machine itself, began to appear in the late Sixties.
Today there are more industrial robots in Japan than anywhere else. It's believed they have well above 70 thousand industrial robots at work now, with many more being added each month. The US is second, with perhaps half or more that number, steadily growing of course. Germany and Sweden are believed to have between10 and 15 thousand robots each, on production lines, with other countries also adding them.
The Soviet Union of course has many robots in similar applications, but it's much harder to estimate their numbers, which are believed between those of Japan and the US. These numbers are purely for industrial, useful robots, and do not include toys or learning machines.
Hobby Robots
By far the best-known hobby (educational robots) are the two Heros (Hero 1 and Hero Jr.) available from giant kitbuilder Heath Company, of Benton Harbor, Michigan. In addition to being able to walk (roll, actually) talk, listen, and pick up objects, Hero can move about on flat surfaces. Hero can also be programmed to execute numerous motions, pick things up, and so on. Available as a kit, or assembled, Hero 1 is widely used in advanced science and other educational courses. In several versions, Hero costs from about 800 dollars up.
Many simpler kits are available for building turtle like robots which can roll about, often being programmable to avoid objects. Robots which can walk, as opposed to just rolling, are too expensive to be anything but research robots.
Educational Robots
In addition to Heath Company's Hero 1 and Hero Jr., several firms are producing educational robots, among them Microbot, of Mountain View, California, Rhino Robots, in Champaign, Ill., and Mitsubishi Electric, in Japan. Microbot also makes and sells a small IR called Alpha. Unlike other teaching robots, Alpha can do truly useful work, handling light materials in factories.
Promotional Robots
We see "robots" at Disneyland, Epcot Center, trade shown, in Hollywood films (R2D2, and Hal, the computer in 2001). These are promotional or entertainment robots. Usually they can speak, and some can understand a few words or phrases, and move around on small wheels. Some can also do simple tasks like giving out flyers or cards, or pour a beverage. This is hardly useful work, which is what "real" robots do. Star Wars (1976) aroused great popular interest in robots, and "robots" which have appeared publicly include look-alikes of Marilyn Monroe, Muhammad Ali, and Robert Redford. These are few in number, but they have raised public expectations about robots to unrealistic heights.
Robot Brains
The robot brain s, you guessed it, a micro computer. In fact, many educational robots can be operated using a home microcomputer such as the Commodore 64 or Atari 800, or an Apple or IBM. The robot's computer brain is made up of the same three sections as a home microcomputer: Memory (data storage), data processing (CPU or Central Processing Unit) and input and output-accepting information and sending it out after processing it. The data coming in (from the fingers on the gripper, or the TV camera, or sonar in the case of object-avoidance) is digital information; ones and zeros strung together into groups of eight (or 16 or 32). A group of eight bits of data is called a byte, and the size of the brain's (microcomputer memory is specified as so-many thousand bytes.
The Human Brain
The human brain is divided up into many separate areas. One handles sight, another smell, another touch, and so on. Similarly, a microcomputer for a robot has separate functions. One part may handle reflected light (in a room for object-avoidance), another may report to the Central Processing Unit the weight of an object the gripper has picked up, while another part decodes words or sounds received through the robot's "ear" (microphone). Although robot technology has expanded dramatically in the last hundred years, it has only been in the last 25 years that the long-standing dream of automated factories has become a distinct possibility. Modern robot technology is the final major technological breakthrough needed to turn this exciting possibility into reality.
Robot capabilities have expanded substantially in recent years, but the level of understanding of just how to apply them has not kept pace. Before industrial robots can hope to achieve their full potential, it's essential that engineers and technicians understand what robots are, just where and how they can be used, and how to select the best industrial robots.
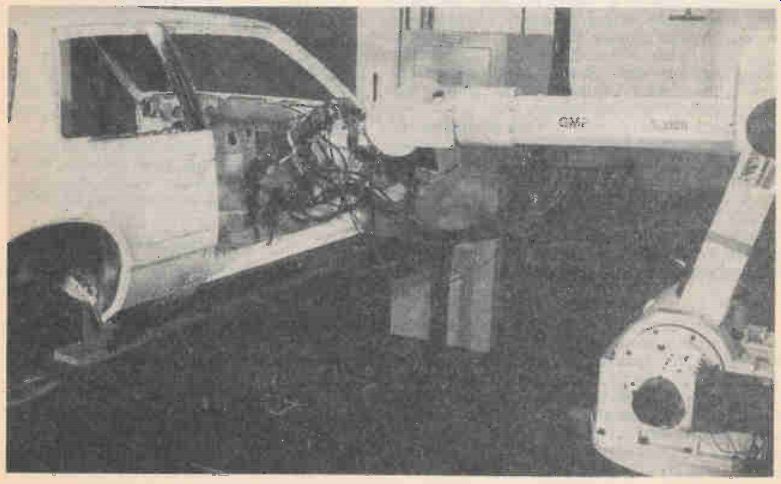
----------- GMF industrial robot shown here welds the bottom of automobile
door opening. The small claw at end of arm are the two welding electrodes.
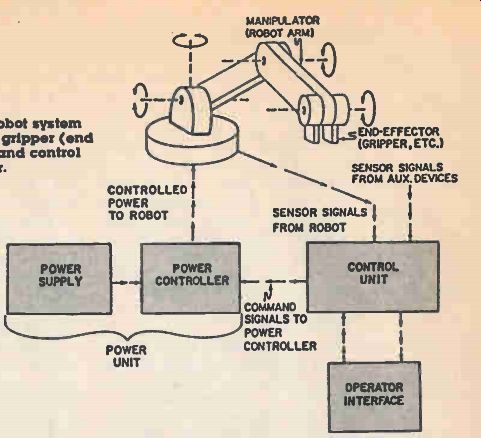
---- Figure 1. Main parts of an industrial robot system show the robot,
consisting of arm with gripper (end effectuator), power supply, controller
and control unit. All are controlled by the operator.
Automation and Industrial Robots
In order to gain a better understanding of what an industrial robot is, we will now turn our attention to industrial automation. The general term automation covers anything from simple powered tools up to entire factories under complete computer control. But two main classifications are recognized: hard automation and flexible automation.
Automation
In hard automation, an operation is performed by a tool that has been specifically designed to perform that task. Because of the high initial costs, hard automation is generally used only for long-run manufacturing operations. Hard automation can't be economically justified for use in short-run manufacturing operations where frequent changes are required. The cost of direct labor in such operations is almost always lower than the cost of the special tooling required. Manipulators using mechanical stops with limited adjustment fall within the classifications of hard automation.
Because of the high cost of hard automation in batch (short-run) operations flexible automation was developed. Unlike hard automation, flexible automation can be readily adapted to product changes. The change from one job to another can typically be accomplished by simple adjustments or basic reprogramming (rather than reworking or replacing equipment). Industrial robots fall into the general classification of flexible automation.
Programmable
The industrial robot is controlled by a form of programmable control that can store a sequence of movements. The controller is programmed to direct the arm and end-effector through a series of motions.
Once programmed, the robot will repeat the desired operation until reprogrammed. If the robot is to be used in another location or operation, an entirely new sequence of movements can be created by reprogramming the controller.
Multifunction
The industrial robot is capable of performing a wide variety of tasks. Generally, any task within the reach of the robot can be performed during a single cycle.
For example, a robot can pick up a workpiece, load the piece into a machine, unload the machine, place the piece into an inspection station, unload the inspection station, and finally place the workpiece on a conveyor belt.
-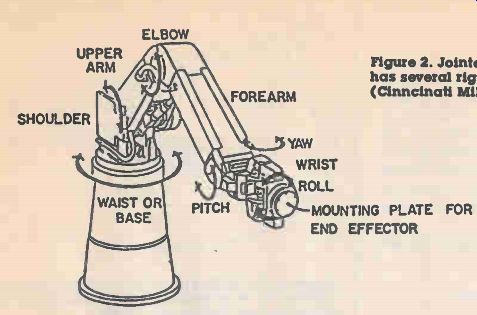
Fig. 2. Jointed-arm robot (the most common type) has several rigid parts
connected by rotary Joints (Cincinnati Milacron).
Manipulator
The industrial robot differs from machines employed in hard automation in its ability to move an object through space while at the same time reorienting its position (that is, changing its place and direction relative to its surroundings). This capability allows the robot the perform tasks that previously were performed only by human workers.
Industrial robots can best be described as machines that fill the gap between the highly specialized capabilities associated with hard automation and the extreme flexibility typical of human labor.
Four Robot Types
Robots already in use which can be programmed to perform particular operations fall into four groups:
(1) Fixed-sequence robots (2) Variable-sequence robots (3) Numerical control robots (4) Playback robots.
The last category are robots which can be taught a sequence of complicated operations by a worker who "walks" the robot through its paces. Once the operator is satisfied the robot can do the job perfectly, it's on its own; the sequence is stored in its memory and thereafter it can keep doing the task (s) as long as desired. That's usually until the robot is needed to do another job, or the job is changed to become even more complex. These are called "second-generation" robots.
More recent (third-generation) robots can be programmed to respond to changes in the situation.
These are usually something which it can sense by sight or by feel; visual or tactile sensing (or both). In other words, these more sophisticated robots can detect changes in the world around them and make decisions based that information. These decisions affect the actions of the robot.
Fixed Sequence Robots
These machines perform successive steps in a given order. Preset conditions and information are built into the robot and they are not readily changed.
Such machines are barely capable of being called robots because they are designed for a specific, relatively simple operation or series of steps.
Variable Sequence Robots
These robots are similar to the above type, except that the information placed into them can be changed readily to accommodate new and different jobs.
Numerical Control Robots
The first numerical control machines (and still the most numerous) were programmable machine tools in machine shops. In these a skilled machinist teaches the programmable machine (a drill press is a simple example, or a milling machine is a more complex one) how to handle a series of operations on a piece of raw metal. After he's gone through the operation correctly the machine can do it. If it makes any slight mistakes he reprograms the memory of the machine (usually a tape) and the machine can then do it properly.
These numerical control machines are used widely, and the information they use can be on punched cards (IBM cards) as well as magnetic tapes.
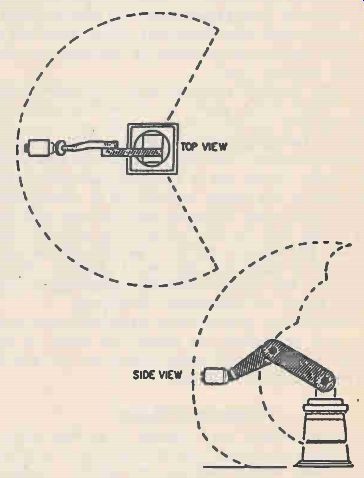
Figure 3. This Jointed-arm robot has an Irregular (non-symmetrical) work
volume (area).
Playback Robots
This is an extension of the numerical control system. The word playback suggest the tape playing back the sequence of operations recorded on it by the human operator, the "teacher". How They Work Industrial robots are generally fixed in place, though obviously they may be moved for new tasks.
Most often they consist of an arm mounted on a base, with the electronics (brain) in the base. The arm is capable of motion in two or more axes, up to maximum of eight. See the diagrams showing left right arm mobility, and rotation of the "wrist." These are two of the possible axes of motion, which are among those the human arm can make (much more easily). The possible motions for a robot arm (and a human one) are as follows:
(1) Arm sweep, or left-to-right movement
(2) Shoulder up-and-down movement
(3) Elbow extending (arm goes backward/forward)
(4) Body turning (left/right)
(5) Wrist up/down (pitch)
(6) Wrist left-right (yaw)
(7) Opening of hand (gripper)
(8) Change direction of hand (gripper)
Many robot arms use only five or six of these motions, even so achieving a great deal of movement and complicated tasks.
The robot arm is a combination much like our own arms. It includes a shoulder joint, the arm itself, a wrist, and a hand-like extension. Taken together these can pick something up, carry it, perhaps turn it over or around, and place it down in a desired place.
The robot's work area determine where (how far) it can reach, first to pick an object up, and then how far it can go to put it down.
The arm must articulate (move) in at least three ways. These three paths of motion include (1) extending and retracting the arm (in and out), (2) rotating or swinging (left and right), and (3) elevating or lowering the arm. The wrist must also be able to do three things. These are to bend, to yaw (spin from either side to the other), and to roll or swivel (roll down to either side). If the arm and wrist can each do these things, just like the human wrist and arm, the robot can pick up and use any object the gripper can reach. This is called six degrees of freedom, which means that the robot arm-wrist combination can move in any of six independent directions.
In addition, the gripper must be able to open and close, and preferably, to adjust the force of its "fingers" to the object being picked up (to hold it securely, but not to crush it). Categories of Motion Although robots vary widely in configuration, mechanically speaking most fall into one or another of four basic motion-defining categories - jointed arm, spherical-coordinate, cylindrical-coordinate, and Cartesian-coordinate. Each of these configurations has its own unique work envelope or volume.
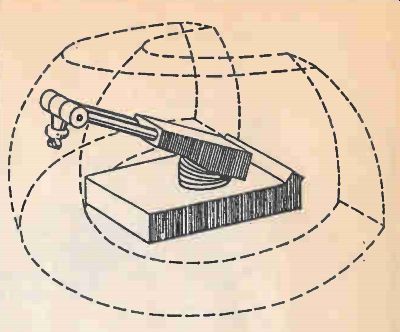
Figure 4. The dotted lines above show the work volume of a spherical-coordinate
robot as a sphere whose top and bottom are cut off.
The size and the shape of the work volume is one of the most important characteristics to consider when selecting a robot for a particular application. Robot manufacturers' brochures describe the work volume, envelope, or range, with the aid of one or more scale drawings.
What a given robot manufacturer means by "work envelope" or "work volume" (also called "solid work area") is crucial. Generally speaking, work volume includes each and every location in the vicinity of the robot which can be reached by some point on the wrist of the manipulator-not the tip of the end-effector (see Fig. 1). This is because the robot manufacturer can't predict the shape or size of the end-effector that a given user may have in mind. Generally speaking, the robot will be able to reach outside of the work volume specified by the manufacturer because of the added dimension of the end-effector. This extra reach is taken into account when planning for the safety of the people working near the robot, and considering the placement of equipment around it.
It should be noted that the robot, as received from the manufacturer, rarely includes the end-effector.
Since every task is unique in the type of workpieces that will be handled, robot manufacturers leave the design and construction of the end-effector to the user.
We'll examine the work-volume shapes (solid areas) of the four basic robot configurations.
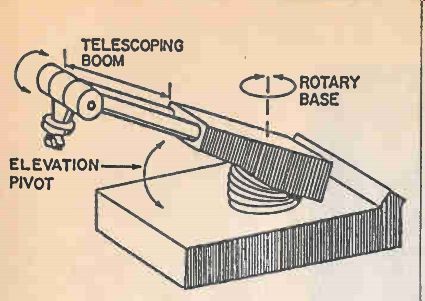
Figure 5. This is a special type of spherical coordinate robot with limited
work volume. It can move around only around its rotary base and up or down.
Used mostly for moving parts from one spot or another.
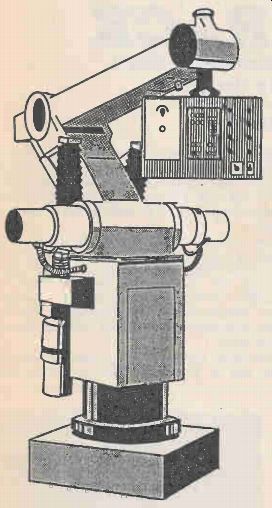
Figure 6. This is one of many point-to-point, limited motion robots.
Jointed-Arm Robots
Also referred to as the jointed spherical-coordinate robot, it is the jointed-arm robot that most closely resembles the human arm. This robot consists of several rigid members connected together by rotary joints, as shown in Fig 2. These members comprise the major axes, or degrees of freedom, of the robot.
Up to three additional degrees of freedom may be provided at the extremity of the forearm. Such an addition is generally referred to as the wrist.
The rigid members are analogous to the human upper arm, forearm, and hand; the joints are equivalent to the human shoulder, elbow, and wrist. A robot arm of this type is generally mounted on a rotary joint whose major axis is perpendicular to the robot mounting plate. This axis is known as the base, or waist. Up to three wrist axes--pitch, yaw, and roll--can be used to control the orientation of the end effector.
Figure 3 illustrates the irregular work volume of the jointed-arm robot. Note that work-volume information provided by the manufacturers is generally specified for the weight of the robot components only, and does not take into account the load that the robot may have to handle.
The length of the arm, joint arrangement, and range of motions of the joints determine the limits of the work volume. In some cases, these limits will change if the robot is called upon to handle particularly heavy loads. In this case, the end result may be a smaller work volume.
The jointed-arm robot is used where it's necessary to get into difficult areas, such as inside the body of a car.
Spherical-Coordinate Robots
The configuration of a spherical-coordinate robot is similar to that of a turret on top a military tank. It has a rotary base, an elevation pivot, and a telescoping extend-retract boom axis. Three more axes are sometimes used, letting this robot imitate the action of the human wrist, pitch, roll, and yaw.
Figure 4 shows the nearly spherical work volume (solid area) of the spherical-coordinate robot.
The robot in Figure 5 is an example of the spherical coordinate robot. Because these robots can extend and retract their boom axis, they are used in operations where it's necessary to reach horizontally into the work area. Loading and unloading punch presses and die-casting machines are typical of such operations.
Cylindrical-Coordinate Robots
Cylindrical-coordinate robots are made up of several orthogonal (mutually perpendicular) slides and a rotary base, as shown in Figure 5. Additional rotary axes are often used to allow for end-effector orientation. It is called a cylindrical-coordinate robot because of the shape of the available work volume (solid area). The cylindrical robot is one of the most stable with regard to loading. Since there are no pivot joints in this kind of robot (except for the rotary base, and possibly in the wrist joints) load handling is greatly improved.
This kind of robot consists of several orthogonal slides with a non-rotary base. The end effector is positioned inside a rectangular (Cartesian) coordinate system. These robots may also be called rectangular motion robots.
Point-To-Point Robots
The point-to-point (PTP) robot is one subset of the servo-controlled robot class. This is the most common servo-controlled robot, being used in a wide variety of industrial applications for both parts handling and tool-handling tasks. The robot shown in Fig. 6 is typical.
The point-to-point robot takes its name from the approach used to "teach" the robot a series of points and operations to be repeated on command. The robot's manipulator is moved to the desired point in space by means of manual controls, and the outputs of the position sensors are stored in memory.
Another group of servo-controlled robots is the continuous-path (CP) robot. These are the simplest robots to operate, and require the least knowledge of robotics on the part of the operator. It's far more important that the operator be skilled in the nature of the operation that the robot is to be taught. If the robot is to be used for spray painting, for example, the operator should be a skilled spray painter; if the robot is to be used for welding, the operator must be a skilled welder; and so forth.
The operator leads the robot through the task by moving the end-effector and tooling (a spray gun or welding torch in this example) while the robot control continuously records the position, orientation, and related operations. Since every motion of the operator is recorded any deviation from the desired path is also recorded--which is why it's important that the operator be skilled in the operation the robot is to perform. This method of programming is called teaching or playback programming.
The program recorded during lead-through can be played back from memory as often as required. An important additional feature is that the program can be replayed at speeds different from those at which it was recorded. Therefore, the cycle time can be varied as required, to compensate for changes in the manufacturing process.
Components of the Robot System
We have seen that IRs are available in a wide range of capabilities and configurations. However, all IRs include four major parts, which are as follows:
(1) The manipulator-the mechanical unit that actually performs the work
(2) The controller-the brain that stores data and directs the movement of the manipulator
(3) The sensors--the sensory system that connects the manipulator functions to the controller
(4) The power supply-the unit that supplies energy to the manipulator
The Robot Manipulator
The manipulator is a series of mechanical linkages and joints capable of moving in various directions to perform the work of the robot. These linkages and joints can likened to the limbs and joints of the human body. In the human body, motion is imparted to the limbs by a series of muscle fibers, while the joints allow the limbs to assume a wide variation in attitude and orientation. Not surprisingly, the robot operates a little differently! In the robot, the linkages and joints receive their muscle power from mechanical actuators. These may be pneumatic or hydraulic cylinders, hydraulic rotary actuators, or electric motors. The actuators may either be coupled directly. to the mechanical links or joints; or indirectly coupled through gears, chains, or ball screws. If the manipulator uses pneumatic or hydraulic actuators, the flow and direction of the oil or air are controlled by control valves mounted on the manipulator. Electric motor actuators receive their power from remotely-mounted power-control amplifiers.
The dynamic properties of a given manipulator include its stability, resolution, repeatability, accuracy, and compliance. These characteristics depend upon the tool at the end effector and its function, the arm geometry, the accuracy of the individual servos, and the quality of the computer programs that perform the position and velocity computations.
What's Ahead
The programmable robot which can respond fully to changes in its environment is the ultimate robot of course. Robots who can understand spoken commands and answer "intelligently" as in the movie 2001, are on the way. But even when they appear to understand, it will only be to a limited number of commands.
Also see: Ultimate Guide to Industrial Robotics
More from EH magazine: All About Capacitors
Adapted from: Electronics Handbook--Spring 1987