AMAZON multi-meters discounts AMAZON oscilloscope discounts
The values of PID for a new system can also be determined by placing the system in automatic (closed-loop) mode, using gain only. The previously-used example, involving barrel heaters for a plastic-injection press, will be used again; the heating elements will be the smaller heating elements used in the previous example. The open-loop and closed-loop methods of determining PID values should produce similar results.
Since the system needs to operate in closed-loop mode and act as a proportional-only controller, the value of the integral will be set to infinity, and the value for the derivative will be set to zero. This effectively makes the system a proportional-only (gain-only) controller. Since we are trying to determine a safe value for gain, we should start testing the system with a small gain of 0.1. Next the SP will be adjusted to a value that represents 25% of the maximum PV the system can achieve. (This assumes that the system can safely operate at 25% of its maximum PV.) In the previous example of the barrel heaters for the plastic-injection molding press, the maximum temperature the barrel could reach was 800°F, so 25% of 800°F would be a setpoint of 200°F.
The PV should be allowed to line out and then the SP be adjusted up 70°F to 210°F and allow the system to respond. We are now trying to make the PV temperature start oscillating. If the PV does not oscillate, one can turn the SP down 10°F to return to 200°F. After the temperature returns to 200°F the gain can be increased and the SP can be changed again to 210°F. The system should be checked to see if the temperature is beginning to oscillate. This process should be repeated until the oscillations become sustained, which means they are not growing any larger or any smaller. If the oscillations start to become larger, the gain should be reduced slightly. If the oscillations begin to decay, the gain should be increased slightly. The value of gain when the system is in sustained oscillation is called the ultimate gain (Ku). The period of one of the oscillations is also measured at this time and it's called the ultimate period (Pu). ill. 1 shows a diagram of the sustained oscillation. You should notice that the ultimate gain is identified as a gain of 12 and the ultimate period (Pu) is 10 minutes.
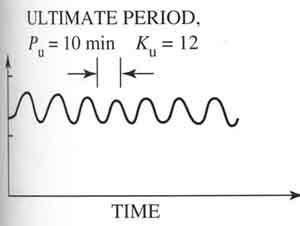
Fig 1: A graph of a closed-loop system that's in sustained oscillation. Notice
that the ultimate gain (Ku) is 12, and the ultimate period (Pu) is 10 minutes.
The formulas in ill. 2 will be used to determine the amount of gain for a proportional-only (P-only) controller, the amount of gain and reset for a proportional and integral controller (PI controller), and the amount of gain, reset, and rate for a three-mode PID controller.
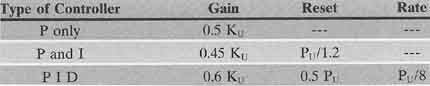
Fig 2: Formulas for calculating gain, reset, and rate for a closed-loop
system. The values of ultimate gain Ku and ultimate period
Pu must be
known.
Since we know that the value of the ultimate gain (Ku) is 12, and the ultimate period (PU) is 10 minutes, we can complete the calculations from the table and determine the values for gain, reset, and rate. These calculations are shown in the table in ill. 3.
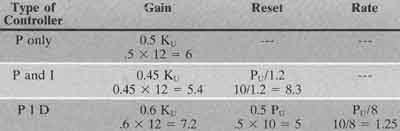
Fig 3: This table shows the results of the calculations to calculate
gain, reset, and rate using the closedloop method.
From the table in ill. 3 notice that the gain for a proportional-only controller should be set to the value of 6. If the system is to be operated as a proportional and integral (P and I) controller, gain should be set to a value of 5.4 and the integral should be set to 8.3 minutes. If the controller is operated as a PID controller, the gain should be set to a value of 7.2, the integral should be set to 5 minutes, and the derivative should be set to 1.25 minutes.
Since the open-loop method and closed-loop methods were both used to determine the values of gain, reset, and rate (PID), observe that both methods produced values that were similar. Technicians often prefer to use the open-loop method because they have more control over the output if the system starts running away.
PREV: Determining
PID Values for Slower-Responding Systems
NEXT: Adjusting Gain, Reset, and Rate After a System Has Been Running