AMAZON multi-meters discounts AMAZON oscilloscope discounts
A typical cylindrical robot is shown in ill. 1 and a diagram of this type of robot is shown in ill. 2. From the diagram notice that the motion of this robot is basically up and down at the main part of the body and circular at the base. The name cylindrical comes from the physical shape of the work envelope. The work envelope of this type of robot is in the shape of a cylinder.
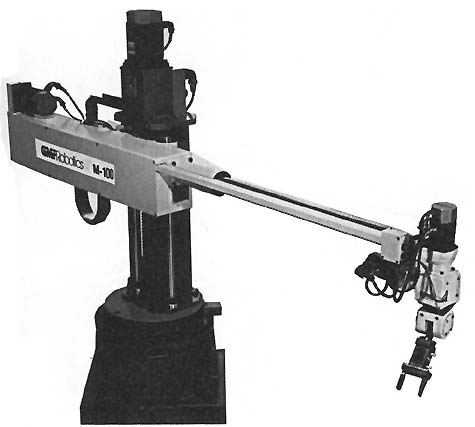
Above: ill.1 Picture of cylindrical robot. Notice the number of
places motion can occur with this robot.
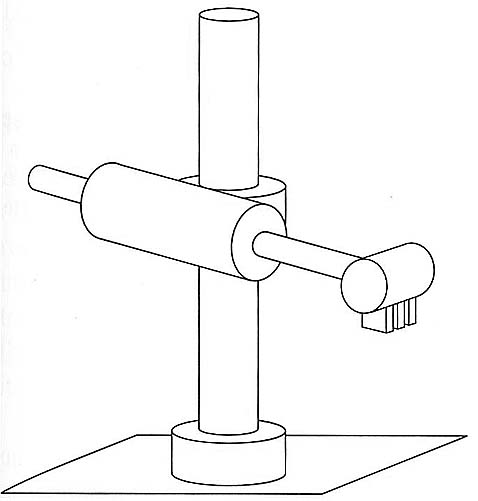
Above: ill.2 Motion of cylindrical robot. Notice
the up-and-down motion and extend-and-retract motion of the arm are controlled
by a pneumatic cylinder or ball screws. The rotation of the base of the
robot is controlled by a motor and gear that make the arm swing in an
arc.
The motion of the main arm is up and down. The robot can perform this motion by extending a cylinder that's built into the arm. In most cylindrical robots, the up-and-down motion is provided by a pneumatic cylinder, and the rotation is generally provided by a motor and gears. Any part of the robot that's moved by cylinders will generally move until it hits a stop. The location of the stop is determined by placing stop blocks or location pins. The cylinders are moved by pneumatic energy (air pressure) that's controlled by simple solenoid valves. The controller determines the motion of the rotation by energizing the motor until the encoder determines the correct amount of movement has occurred.
Additional movement can be achieved by attaching a wrist to the end of the arm cylinder. In some robots the wrist is complex enough to provide one or more additional degrees of freedom. These are called pitch (up-and-down motion at the wrist), roll (rotational motion at the wrist), and yaw (side-to-side motion at the wrist). Wrists are available with one, two, or three of these motions depending on the expense of the robot and the application it's used for.
| Top of Page | PREV: Types of Industrial Robots | NEXT: |