AMAZON multi-meters discounts AMAZON oscilloscope discounts
Another simple type of robot is called a rectilinear robot because all of its movements are along a straight line. ill. 1 shows a picture of this type of robot, and ill. 2 shows a diagram of this type of robot. In the diagram notice that the motion of this robot is rather limited, but it's simple and inexpensive. The name rectilinear is used because the physical shape of the work envelope is a rectangle.

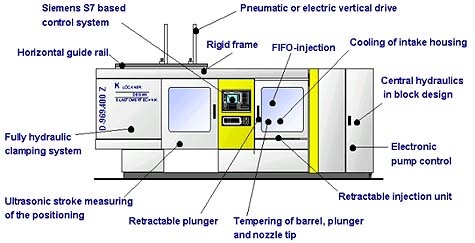
Above: ill. 1 A rectilinear robot that uses pneumatic cylinders to
remove parts from a plastic injection molding machine.
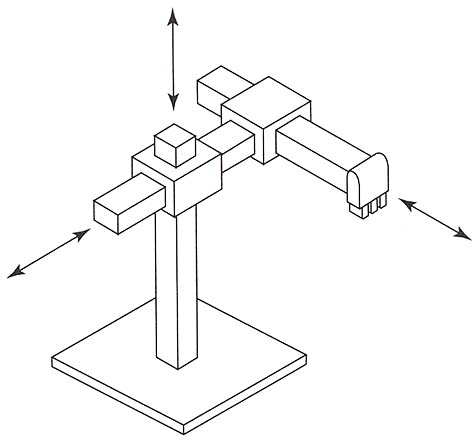
Above: ill. 2 A rectilinear robot. Each of the axes on this type of
robot can only move in linear motion. Ball screws, rack and pinion, or
pneumatic cylinders are used as actuators. Arrows indicate the direction
of motion each axis provides.
This type of robot is used for fixed applications such as machine loading and unloading, palletizing, and other simple material handling functions. In each of these applications, the motion can be supplied with pneumatic cylinders, ball screws. or linear (stepper) motors. If pneumatic cylinders are used, they are generally allowed to move until they travel against a fixed stop. Intermediate points along the travel can be used as stop points when movable stop blocks are moved in and out of position with solenoid valves.
If a ball-screw mechanism or a linear stepper motor is used, a more precise positioning point can be achieved. In one simple application, this type of robot is used to unload clear plastic lenses for automobile headlights from a plastic press. If the press opened and the parts dropped directly on the conveyor while they were warm, they would become warped and not pass inspection. A rectilinear robot with a pneumatic cylinder for vertical motion and linear motion is used. A ball screw that's controlled by a stepper motor is used for the final travel to pick the part from the open mold. A vacuum-cup gripper is used to grasp the lenses as they are pulled from the mold and moved to a conveyor. ill. 1 shows this type of robot. The total range of travel consists of eight steps starting with the robot arm waiting above the press. The steps include:
1. "Down" into press (after the mold is opened completely, the up/down cylinder is extended to lower the gripper to the right height to align with the part in the mold).
2. "Pick" forward (ball screw rotates clockwise and moves gripper toward part to "pick" it off the mold. When the gripper makes contact with the part, suction is turned on to hold the part).
3. "Pick" back (ball screw rotates counterclockwise and moves the part away from the mold so that it's clear to lift it out of the open clamps).
4. "Up" out of the press (up/down pneumatic cylinder is retracted to lift the part up and out of the press).
5. "Extend left" (extends linear motion air cylinder to move robot away from press over the conveyor).
6. "Down" on conveyor (after robot is moved over conveyor the up/down air cylinder extends and lowers the part to the conveyor where vacuum on the gripper is turned off and the part is released gently to the conveyor).
7. "Up" (after part is released, the up/down cylinder is retracted to lift the robot arm up).
8. "Retract right" (the linear motion cylinder is retracted to move the robot arm back to the starting position above the press).
Since all of these steps are sequential, the sequencer instruction in a PLC is often used as the controller. Note that the sequencer instruction is explained with several applications in PLC instructionals. If this type of robot stops, the technician can use the PLC to determine the step the sequencer is on and determine which output solenoid valves should be energized or de-energized.
| Top of Page | PREV: Cylindrical Robots | NEXT: |