AMAZON multi-meters discounts AMAZON oscilloscope discounts
While industry plans and researches and builds toward an automated improvement in their operations, there are some companies who are looking into the possibilities associated with the so called domesticated robots. These are special household and office machines which, they say, will become as familiar in the future as a household pet, and they will do much more than any pet-even though it be well trained.
We now examine some types of domestic robots as they appear today in various market places. Through the courtesy of Quasar Industries, we show an example of what a domesticated android might look like in Fig. 1. Particularly interesting is the robot's somewhat formidable vision window, which seems somehow to conceal things that we really shouldn't know about. In the market place, trade fairs, on TV, and on stage robots of the type shown are being seen more and more often, and their capabilities are being enhanced every year so that they are approaching the state where they might be called android instead of robot.
THE ANDROID EXPLAINED
What is an android? In the field of robotics there is a good and precise definition.
android-A human appearing type of machine which duplicates in appearance and some actions the human body and its functions. May converse, and does respond to external stimuli with pre-programmed responses.
This is the type envisioned by sci-fi writers as the companion to the hero in far-out escapades.
I add, in this writing, that the conversation capability is now enhanced by a capability to formulate responses by analyzing the questions asked, and thus it does not depend solely on programmed responses as was the case in the past. Also we must now add that the android is capable of sensing and analyzing to a much more advanced degree than it was in the past.
So what is the definition of a robot? A natural follow up question.
robot -A general term which stands for an automated unit which does have some kind of human symbolization in its operation or physical structure. It may not look human, but it seems to be able to perform human type functions and actions.
In this guide we shall find that there are many industrial robots in operation and that they do, indeed, perform many human-type mechanical functions. Usually we will find that they are programmed in some manner to perform the tasks that they have to accomplish to do a job. We also note here that the most advanced type of electrochemical-mechanical machine it is possible to conceive of has been defined in these same references as a cybert. So, while we consider the word android because it is well known, and conjures up visions of C3P0 in Star Wars, when we consider household tasks we really have to think of a cybert. We will also use the word robot because it is commonly used, and is understood to represent a type of machine which can do things, as indicated in our definition.
Fig. 1. A domesticated android (on the right) (courtesy Quasar Industries).
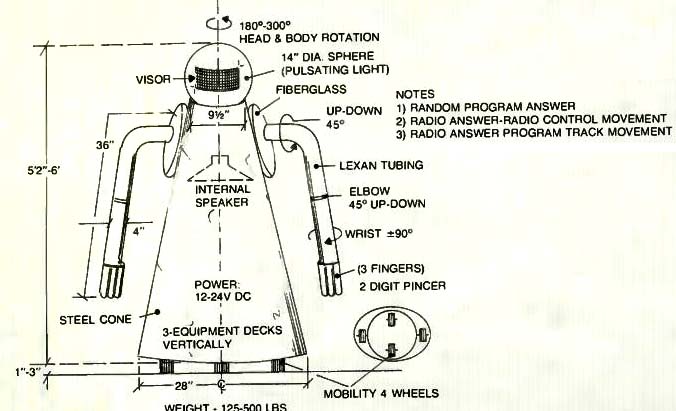
Fig. 2. Mechanical details of one type robot.
We find that one of the tasks confronting us at this moment is sorting out what kind of machine we are to be concerned with. The machine gets a different name each time its intelligence and mechanical ability advance, it seems. In order not to get lost in semantics, I suggest that you choose a name which has meaning to you and use that. What we will be considering is a thing like that in Fig. 1!
SOME MECHANICAL CONSIDERATIONS
Examine Fig. 2 for some of the mechanical details of this kind of robot. Here we find something concerning the dimensions and sizes of the various external parts of the body.
We also learn something of the movement of this type robot.
Of course these considerations can be changed with some adjustment of the drive motors and limit switches and control mechanisms. It is to be noted that movement is accomplished by electrical signals to two motors, one on each side of the body, with two more wheels-fore and aft-used as stabilizers. One would suspect that the drive motors in some applications would be stepping motors driven by a series of pulses.
This permits very precise control. When the motors are in step together and in sync the robot goes straight, and turning capability comes when one motor is stepped faster than the other. The amount of stepping difference governing the speed of angular rotation, or turning.
The power supply would, in any type of autonomous robot or android, be a battery. One would desire a light weight, long life, easily and quickly re-chargeable, high ampere capacity unit. Of the types common at present the nickel cadmium or silver-zinc batteries come closest to meeting these ideals. Other types will be an outgrowth of developments for the space exploration programs, and for the expected electric automobiles which so many manufacturers are now researching. An ideal robot will have its own charging unit built-in and the unit will be able to find a wall socket itself and govern its own charging operation. Some robots have been built which can do this at the present date.
WHAT WILL A DOMESTIC ANDROID DO?
One of the questions posed is "What will it do?" If one is planning beyond just the construction of a robot, then one must plan tasks for it and determine how the robot will perform those tasks. Here is a list of what Quasar Industries believes a domestic android can be programmed to do:
*Answer the door when guests arrive. Take their garments, place them, and announce the visitors.
*Using a standard tray, serve pre-mixed drinks hors d'oeuvres, and perhaps even meals, provided someone replenishes the tray.
*Using several accessories, the robot will, vacuum rugs, polish floors, and dust general living areas, being guided by a computer program.
*Monitor the average home or apartment for fire, smoke, or unauthorized entry during any specified time period.
*Constantly monitor the house temperature and adjust by direct control (mechanical) or by remote control (sending signals to another unit).
*Monitor children during play or rest-time, or monitor convalescing persons sounding an alarm if the normal activities change significantly.
*Respond verbally to verbal commands and questions and provide information which is stored in its memory banks.
*Help provide education, amusement, and display cultural information.
*Cut the grass, rake the yard, take the dog for a walk, and other outdoor activities.
The ideas associated with "What will it do?" are not at the zero level. There are more ideas in this area of thinking than there are dollars to develop them. This means that the most important tasks will be automated first and then the smaller or less useful tasks and jobs will be accomplished later. It could be interesting for you to sit down and with a pencil and paper make a priority list of the tasks and jobs around your home, carrying this list out as far as you can possibly vision the work to be done.
Quasar gives us a titillating thought in an example of a homemaker who is getting ready to go to work. Having decided that the rug needs vacuuming, the command unit is taken up and the homemaker commands the domestic android quickly with the date, time, and function code. The robot then sends a confirming reply. Even the concept of having a robot prepare meals is not really far-fetched. It might be if the meals were prepared in the manner shown in Fig. 3.
However much amazement might be provoked by having such a robot prepare meals, there is a certain danger when such a machine fools around with flames, heat, or micro waves. The microwaves are not supposed to cause interference, but they might!
Fig. 2
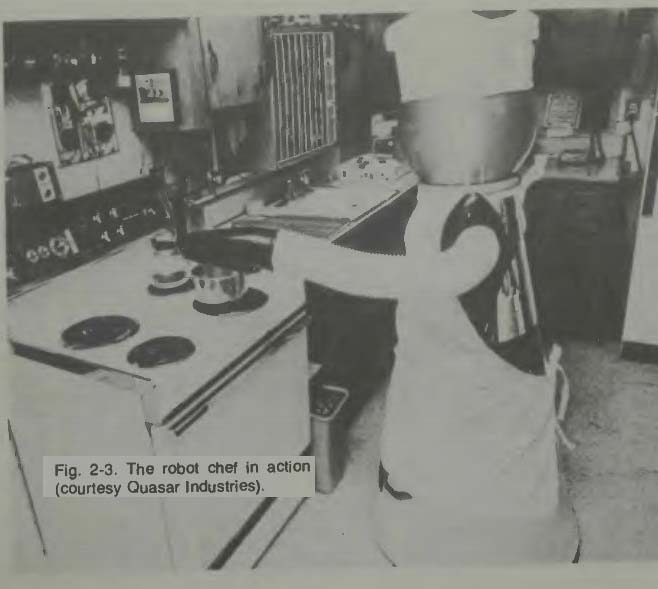
Fig. 3
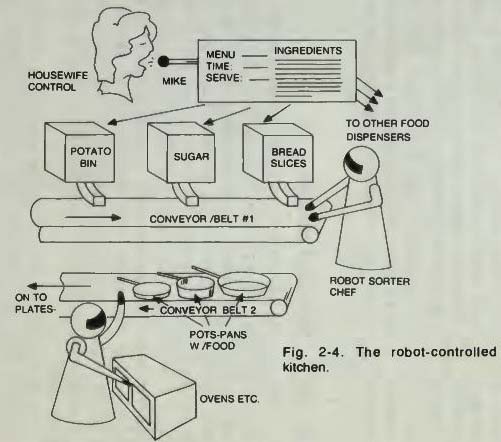
Fig. 4
One suspects that the meal-preparing robot chef will not be a machine as shown in Fig. 3, but will be a built-in expansion of the time-cooking oven which is currently on the market. It would seem that we already have a computerized cook, what we need is a mechanical preparer and a mechanical device to get those dishes into a really good dishwasher. So, perhaps a combination of machines is needed in the kitchen.
One, a robot to get things from cold storage and prepare the dishes, another machine to cook them, and finally, the robot to serve the meal, and place the dishes in the dishwasher. The automatic garbage disposal for everything, papers, broken dishes, bent utensils or anything, must also be present and in operation to clean up the rest of the mess. We offer a diagram in Fig. 4. As shown, you would simply tell the input microphone what the menu for the three daily meals is to be, state the time the meal is to be served, and note that all ingredients are on file. The computer takes over and directs the conveyors and ovens and stoves and robots to the end that the meals are prepared and delivered to the table at the times specified. Of course the human responsibility will be to insure that the bins and refrigerator stores are kept full and in proper placement. Eventually one might be able to eliminate human errors in this job by getting food delivered in response to computer instructions and sent directly to the food bins or freezers, automatically. Thus, once the meals are planned for the week, month, or year, the time frame being of your own choosing, all one has to do is to be there on time and eat! We see the use of mechanical-electrical androids or robots in this example. Let us consider the same job from a slightly more serious perspective. We then ask ourselves if it is possible to completely automate a kitchen. The vision of a completely automated kitchen does not have robots or an droids. It will have a multitude of machines and conveyors and arms such as the ones we have shown in this guide. The "pick and place" one-arm industrial robots can do the task of picking and placing various food items, mixing and combining ingredients, and selecting various tools needed for those various chores. Fixed-location two-handed robots are currently being used in some factories for various types of assembly and some machines have vision sufficiently well developed to be able to pick out various things from other groups or items, so why isn't it likely that food could be an item from which selection must be made.
Let us consider some types of robots currently developed and learn what they can do. The University of Rhode Island engineers have developed Mark IV, a robot that can select parts from a jumble of parts in a bin. Some people at California's Stamford Research Institute have developed a seeing robot arm which can select the proper tool from many tools on a bench and use that tool to bolt down the cover on a small engine. At Carnegie-Mellon University they are working to enable a robot's brain to accept orders spoken in the human voice and, they say, the machine can now distinguish among some 1,000 words spoken to it, and it will ignore strange type human sounds which are not words. Joseph Engelberger of Unimation believes that the future world of humanistics will be laced with robots of the HAL type, and this, you will recall, is the type robot which doesn't appear as a robot at all, but is a space station controlled by computers and machines. Here we are considering a kitchen in a house hold.
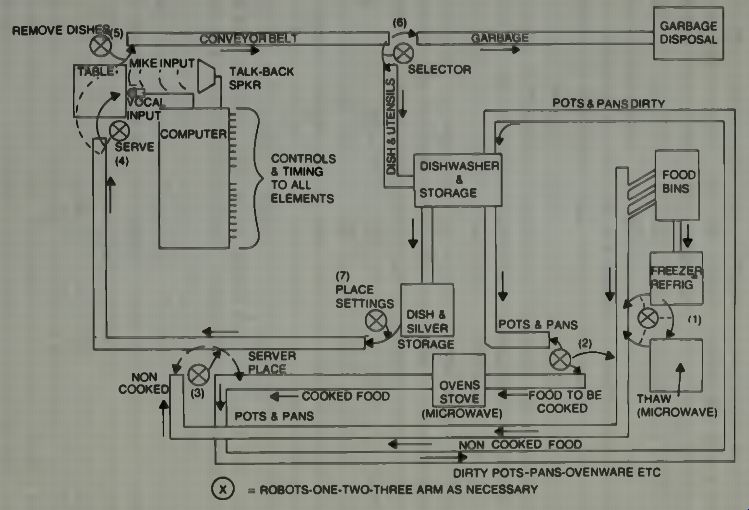
Fig. 5. One concept of an automated kitchen.
THE AUTOMATED KITCHEN CONCEPT
Examine Fig. 5. The premise upon which the sketch is based is that you sit down at a serving table and speak aloud what you desire. A computer will recognize the voice (it won't serve anyone whose voice is not on record) and cause the various plates to be prepared and served at the table in the proper locations. Once the meal is concluded and you tell the computer that a clean-up is in order, the plates and all will be removed and everything will be returned to the pre preparation state-even to the ordering of such stores and foodstuffs as are necessary to replenish those supplies used in the meal! Look again at Fig. 5. There are many loops of control necessary. Here and there one will assume that there are "pick and place" type robot arms, mounted to fixed stands.
These select, mix, prepare, and place foods, equipment, and utensils as necessary. As you will see there are many direct feed type units such as from the food supply bins. We assume also that somehow these bins will have been pre-loaded, either automatically or by human effort.
You need a lot of conveyor belting as shown by the double lines. Then you will need quite a few "pick and place" type robots and some quite intelligent robots which can detect the various kinds of foods, do the proper mixing and selection of plates and pots and pans and such in order to cook the food. A small microcomputer directs the whole operation and it receives its input from the people seated around the table, this input being an order for whatever kind of food is desired. Notice that the computer has a talk-back capability so that if it does not understand, or you do not give it instructions in the proper manner it can request a repeat or correction. Even if you do have an automated system it must be told every shade of every task and function that it is to perform, otherwise it will send the silver to the garbage and the garbage into the dishwasher. If you are so inclined, take a pencil and paper and improve on the system shown. It could be easier to just have pre-planned meals and assign a code number to them. When you sit down to get breakfast you simply say "Bring me A-21" and you can get your toast, eggs, bacon, coffee, etc.
When we consider the automation of a range of activities as shown in Fig. 5, then timing of the various processes is very important. On an assembly line where it takes a finite time for various items to reach various assembly or distributing positions, any delay in a sub-activity must mean that somehow the computer will recognize this and delay the later activities until the product has reached the position where the next activity starts. We must also, then, realize that in the completely automated kitchen (or any other activity related to this concept) that there will have to be many sensors along the way which will feed information to the central computer so that it knows what is going on every place at every instant.
This will also stop the machinery in the event of a malfunction or a breakdown at some point in the system. Voice communication to the machinery is not at all impossible. It is being done all the time. I've enjoyed playing chess with a vocal computerized chess opponent and was delighted, once, when it said in its characteristic flat tone; "I lose." I have also seen a device called a ROBOT 1, made by Heuristics, Inc. which plugged right into an Apple II computer and enabled a person to control a small battery operated car by voice commands; forward, reverse, stop, left, right and straight. The system used a radio link to the controlled vehicle and required a special program to make the computer operate correctly with the other parts of the system.
You will think of other examples of voice control and no doubt you will realize that various Universities and research organizations are working constantly nowadays to develop voice systems which respond to only a few selected individuals. This prevents troubles which could arise from having anyone being able to operate a system. The use of vocal commands to computers enables the skilled person to free their hands for more useful functions than trying to type on a keyboard. With the added capability of recognizing a persons' particular voice and taking the information that voice conveys and turning it into some action, we have the essentials of the man-machine integration in the world of robotics. Through voice communication we have found a means to affect a nearly instantaneous communication to, and with, machines; called robots, or androids, or automated kitchens! So we consider again Fig. 5 and imagine how such a system would operate. Once the command for breakfast, for example, has been given to the computer, the computer then alerts the various parts of the system to be ready to comply with later commands as they are issued.
First, on the right side of the figure, is a command to the food bin that releases the proper items in proper amounts onto the conveyor belt. Commands also go to the refrigeration unit and its controlling robot (the circle with the X inside) so that as the refrigerated items are issued, the robot will place them on the belt alongside the bin order. If the food is frozen - , then it must be sent to the microwave oven for thawing. This will take a little time and so a delay is now necessary. When the food has properly thawed, the robot will place it in its proper position so that it becomes a part of the order on the belt.
As the meal ingredients move along the conveyor belt they arrive at the second position. Here, those foods which must be cooked are taken from the belt, placed into the proper pot or pan which has been issued from storage. Some food items may not need cooking and so will move on along the belt to robot 3 who has the big job of combining all the prepared food and placing it in the proper dish or bowl for table use.
This same multi-armed robot will place the empty pots and pans on the return belt so that they will go to the dishwasher where they will be cleaned and stored automatically. Can't you just imagine this robot #3 being a four armed, multi digited unit, whirling and waving its arms, as it performs its assigned tasks? Of course, remember that all the while every thing is going on, sensors are relaying information back to the computer about everything that is happening and when and how it is happening.
The food, in the proper dishes, the silver, etc., arrive at the table and now robot 4 begins to serve the meals, each to its proper recipient. The computer directs the order of serving by the order of voice commands, first voice is first served, etc. After a reasonable time, or when ordered, robot number 5 begins to remove the dishes in some pre-programmed order.
Robot 5 puts the dishes on the conveyor where robot 6 will see to it that the garbage goes one way and the dishes and silver return to the dishwasher to be washed and then proceed automatically on to the dish-silver storage shelves.
HOW TO PREVENT THINGS FROM GETTING OUT OF HAND
Prevention before cure, must be the motto concerning automated operations. Think of the modern aircraft with their many complex and intricate devices and their automated electromechanical control elements. How do they prevent mishaps? It is done through redundancy. Space robots are so designed that they have duplicate and even triplicate systems that function should the primary system fail or have a malfunction. In the coming world of robotics, redundancy and reliability will make the systems complex, but they will operate with a minimum of failures and problems. The great wizards of mathematics will manipulate their symbols and tell us exactly whether a system needs to have duplicate, triplicate or quadruplicate systems in order to achieve reasonable reliability.
That means that in general the machine or system will operate correctly most of the time. It does not say that the system will ever be perfect! In a control system the product of the reliabilities of the various sub units will make up the total reliability of the system. For example, if you have ten units, each with a reliability of 99 percent, then the total reliability to be expected will be the product of .99 taken ten times or about 88 percent. What this shows is that each subsystem must have a reliability figure on the order of 100 percent-or as near to it as possible-in order to ever get close to that 98.5 percent total system reliability. You get close to 100 percent on a subsystem by giving it duplication. Reliability engineering of robots in the forthcoming age will be of immense importance and responsibility and will attract the best engineers and scientists that our educational systems can produce.
WHAT ABOUT ROBOT PERSONALITY?
The world of robotics means an integration between people and machines and so some people have considered and made studies of what it can mean to warm blooded, emotional human beings to deal with non emotional, no-blood-at-all electromechanical devices. The studies attach importance to the types of machines which "seem to think," rather than those which are simply complicated or complex. Homo sapiens are a difficult lot, even when they are behaving correctly, so we are informed. It seems that it is much easier for these Homo sapiens to work with machines if the machines in some way reflect their own physical features. Thus we find that some robot manufacturers such as Quasar spend a lot of time considering how different personality traits might be displayed by their display robots.
Figure 2-6 is courtesy of Quasar, and from it you can begin to imagine the considerations that are being made to insure that these promotional display robots attract and amuse the human population instead of provoking and generating fear. It is easy to understand how a robot's appearance can range from friendly to frightening. Perhaps the day has come when the box type robot or the barrel shaped robot is passe. The good engineer designs for fast operation, efficiency, low maintenance requirements, and reasonable cost. He is not concerned, really, with how the thing looks, or is pack aged, unless the size and shape must conform to a particular volume for some very pertinent reason. There are packaging experts who can design appropriate housings for the electromechanical mechanisms. Perhaps they will be called in to help shape the robot machines of the future when the field of robotics demands that we have robots having personalities and bodies to match.
Consider the inanimate human models that we see in the fashionable department stores nowadays. Those models aren't cheap, and the store wouldn't buy them if there wasn't proof that they add to sales. If the same holds true for display robots or androids than we have to ask, "Just how human do we want this robot to appear?" The real "macho" type could be as lifelike as Yul Brynner in Westworld, the movie in which robots run wild. The pretty type could be as attractive as those female manikins displaying the latest fashion gowns in the finest haute couture salons.
But, do we want them that realistic? The cost of cramming all of the machinery into that kind of package would be tremendous. Would the economic advantages of this type of robot over one that looks like C3P0, in Star Wars, be worth the development costs? Fig. 6. Display robot's dress (sales promotional androids) (courtesy Quasar Ind.). What about the bad psychological effects? Perhaps people feel more comfortable working with a machine that looks like a machine than they do with a machine that, due to its personalizing, seems to possess some kind of non understandable intelligence. When a machine seems to be alive it can and probably does, generate some kind of fear in some Homo sapiens. That fear, of course, is usually a fear of the unknown. Since we are conditioned objects in space, and since our conditioning is a result of what we see and hear and experience, and since we see monsters on TV, etc., then perhaps the personalizing of machines may engender in the subconscious some kind of relationship which could be detrimental. Who knows?
NUCLEAR INSPECTION ROBOT CONCEPT
It is a well-known fact that one of the primary areas of robot functioning will be the ones in which mankind has trouble operating. These involve deep space, any place where there is low or high pressure or no oxygen, underwater situations, extremes of heat or cold, and environments in which there is high toxicity or possible nuclear contaminants.
A robot designed for this latter type environment has been investigated by many companies, one of whom is the Hughes Aircraft Industry with their Mobots. Another is Quasar Industries of New Jersey. It is informative to us to examine, by way of instrumentation and operation concepts, what such a nuclear inspection robot are able to do in this kind of nuclear contaminated environment, or in an environment where inspection is necessary and malfunction means contamination. With both the Hughes Mobot, which has multiple arms, video cameras, and is remotely controlled from a switchboard, and the Quasar BIOT, there is a mobility capability which permits moving the robot to an area within its mobile range.
The BIOT is a four footed, mechanical, humanoid robot.
The designer says it is six feet high with a weight of 525 pounds, a width of 30 inches, and a ground clearance of some 3 inches. Its mobility is through wheels which would be self inflating and self repairing. It uses batteries for power, and the movements of its various limbs and tools and grippers is controlled by electric units with hydraulic assistance. It, too, has four arms, each with elbows and interchangeable hands. It has a means of optical reconnaissance in color, a computer control unit, and both hard-wire and radio frequency communication and control. It could use voice recognition as one means of decoding commands and instructions.
In order to have maximum operational and sensory capability the unit is envisioned as having two video color cameras in its head-unit with an auto-couple-panning capability and tilt and zoom control. Each arm bank would also be covered by a TV camera. Other sensors would be a doupler and side-looking radar for guidance and inspection, X-ray close-scanning, Sonic close-scanning, and Geiger probes for very close monitoring. It would also have a gas analyzer as part of its sensory equipment. The tool hands could include tri -pincers, grip/lifts, adjustable torque wrenches, bi -pincer fine-tolerance grips, tool-steel pry level attachments, and a lift-hook.
Then there are hot and cold hands, the hot hand capable of working in temperatures from 70 to 240 degrees and the cold one from 40 on down. Power tools attached for some kind of repair or connection include a rotor drill for 1 / 4 to 1 inch bits, an impact wrench, screwdrivers, a vertical torque rotator, a horizontal torque rotator, a grinder, and a deep heat probe.
Quasar has gone far enough in design and engineering re search on this type unit to have gained a patent on the system and they believe that such units will become acceptable and used in industry in the forthcoming decade.
The chips and the CPUs of computer units are sensitive to elements of our normal environment, so one begins to wonder what kind of shielding and what type computer units will be developed to make the autonomous hostile environment robot a reality. Testing for operation, reliability and durability will be a requirement, just as we now have a requirement to produce environmental chambers in which we subject space probe equipment to various temperature radiation extremes before we launch them on their long cosmic journeys.
THE SECURITY ANDROID
We need not dwell long on the dangers from other Homo sapiens to ourselves in our modern, crowded world. Any newspaper will provide adequate information on this subject.
What is important is that some kind of security is needed.
This can be deterrent to all kinds of trespassers. Notice we do not say that crime can be prevented. We simply say that with adequate security the bad effects may be minimized.
Does the robot or android have a future as a security guard in such locations? Can one really be programmed to detect alien objects which may appear, and which may pose a threat to the regular and permitted inhabitants of the area? Let us see what might be required and then think of what may be possible in view of current technological developments.
If the robot or android is going to patrol an area, it must be able to do so in a random manner. It cannot patrol in a fixed operation where its appearance at any point of its path can be stated as a function of time. All an invader would have to do in this case is simply time the appearance at some point and enter during the time the robot was absent, confident that there would be a definite time interval before it reappears.
That the robot or android would follow a path of some kind in such an area is probably a requirement. It must be able to move itself to any location where its weapons or defense mechanisms can be effective against an invader. If nothing else, its alarm system must alert the proper people to come to the battle. Thus a means of causing it to follow a random walk on a prescribed path is necessary. This path, of course, must not be obvious, nor must it be easily changed or de-activated if it is an active element type of path.
One might suspect then that programming internally might be the path-following criterion. In this case there is nothing external to the robot or android which can be changed to cause it to follow an erroneous pathway, or get itself into trouble. With modern microcomputer capability it would easily be possible to select a general path and then randomize sections of it so that only the computer would know when the robot or android would reverse, backtrack, stop, wait, speed up or slow down as it follows its general trail. It should also be possible to change the movement program from day to day, or at least from week to week so that one could not determine a fixed pattern, no matter what it might be, by watching and counting and timing the machine's movements. Also, by the very definition of randomization, the machine's movements along a general path could not be predicted.
The area would also be safeguarded by some kinds of fixed sensors, such as terrestrial vibration units, which are now available in such sensitivities that they can detect a fox walking on the earth at distances of over 10 feet. Infrared beams of light, invisible to the human eye, can also be used to set up a penetration barrier, and all such devices can be easily arranged so they would signal the robot or android the moment they detect anything foreign to their habitat. The robot then receives an over-ride signal which causes it to speed back to the appropriate location immediately.
It would seem that quick penetration of such barriers might be accomplished. It would be getting out that might prove difficult. Once the sensors have determined that an invasion has taken place, a sufficient number of security robots could immediately move into a tight and overlapping coverage position so that escape from the enclosure would be impossible. Disabling devices could then be used. This could go as far as the aiming and firing of a gun-like weapon. Laser light beams can cause a small weapon to be aimed and fired, just as they cause the big guns on tanks and aircraft to aim and fire. Laser light, blinding in intensity might be used by first causing the intruder to look at the robot. Sound waves, the emission of gas, and other methods might also be used.
How would one pass the sentry if one had permission to enter the area? Perhaps with an automatic device such as is used to open and close garage doors. Pressing the button would tell all devices that a friendly alien was coming inside the guarded area. Thus they would be permitted to pass. The code used in this case would have to be a carefully guarded secret, and might be the only weak link in the chain of security devices. It is a challenge to come up with a security system so that some can pass and all others will be rejected, using some means of distinction which cannot be compromised.
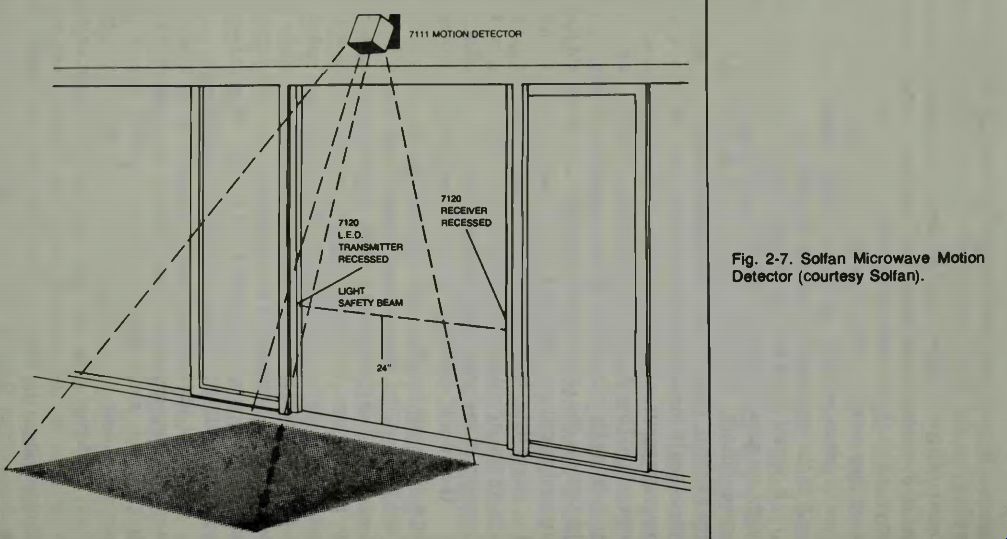
Fig. 7 We have already mentioned one device which might be used in the sensory
role; the infrared light beam and receiver.
Another unit which might be adapted to this role is the microwave door opener, manufactured by Solfan of Mountain View, California. The unit projects a beam as shown in Fig. 7 from its microwave motion detector. When it sees any thing moving in this beam pattern it activates a relay which, in this case, causes the door to open, but which in our application might cause an alarm to be sounded, or a robot to be summoned. Also indicated in the diagram is a light beam unit across the doorway which prevents the door from closing in case a person stops in the doorway. Remember that the motion detector operates on a doppler frequency shift caused by a moving object. Thus, when the object stops moving, there is no signal to the activating relay. The microwave detector in this system operates on one of four channels around the 10.525 Gigahertz region. The relay is activated by a doppler frequency shift when a moving object penetrates its beam. The beam pattern can be adjusted for width, length, and depth. It is sensitive to movement from one inch per second to as fast as sixty inches per second. It operates on 12 to 24 volts ac or dc. Its detection sensitivity can be adjusted using a potentiometer control. Some of the antenna coverage pat terns are illustrated in Fig. 8. If you are a robot designer you will no doubt think of many ways in which this little unit might be used.
I offer one suggestion, illustrated in Fig. 9. Here, four radar units are used to give the robot some self defense features. No one could approach this robot without activating its motion sensors and causing a triggering of its defense mechanism features. One must realize that if a robot is used in a security role, it must be able to defend itself, or at least alert its master to the fact that it is being attacked.
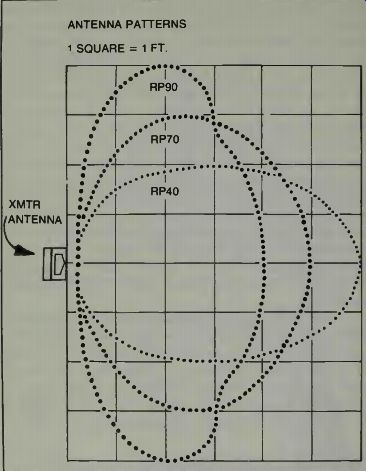
Fig. 8. Solfan Microwave Motion Detector Antenna Patterns (courtesy Solfan).
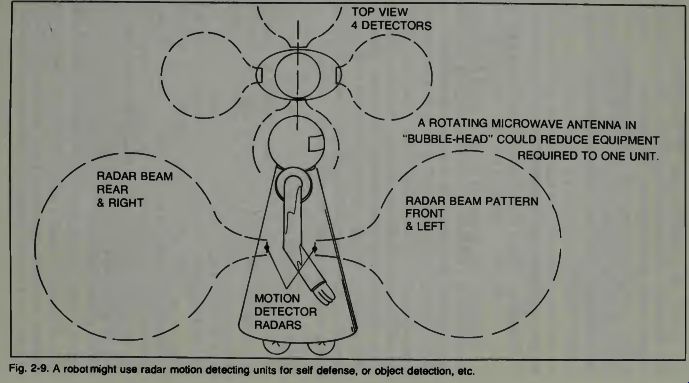
Fig. 9. A robot might use radar motion detecting units for self defense,
or object detection, etc.
PATH CONTROL CONSIDERATIONS
While it is true that some robots have been built that will follow a prescribed path they do not all use the same type of path control. Some use a computerized path specification wherein the path is put into the computer's memory and then the computer activates the steering section in accord with these pre-determined, selected commands. The other method is to use a type of cam. You can well imagine how such a cam following system might be built. A rotating mechanism of some type must turn a shaped cam so that it will make contact with microswitches that in turn steer the robot. This cam arrangement is very simple and reliable. It is not subject to interference and may be changed quite readily by changing cams.
It we expand on the cam concept we can imagine a machine which will shape a cam or cams as we push it around a specified path. Then we simply have to put that cam into the robot's mechanism and it will follow that path which we have laid out, assuming, of course, that nothing happens along the path to cause the timing of the cam steering to be incorrect relative to the robot's present position.
One can also imagine certain subtle variations in this cam steering, motor-controlling concept. One might use magnetic tapes generating tones of various types for various actions. It would seem that with such programmed steering and speed control, a house-movement robot or a lawn and yard and garden movement robot can easily become an autonomous reality!
A TIMED PROGRAM FOR PATH CONTROL
When we consider a robot following a particular path, be it in or out of the house, we must remember that a robot will be asking for some timed directions. A timed direction is simply a signal which says the robot should go for a specified period of time. If the speed of movement of the machine is known, for example assume one foot per second, then you, as Robot Master, know that if you let that signal exist for five seconds the robot should move five feet. I say should because there might be some impediment to the machine's motion.
We begin to see that programming a robot for motion along some kind of path, specified only by the internal timing and speed of the mechanism, is not feasible.
COMPUTERIZED PATH CONTROL
How do we achieve computerized control of the robot for the same path? Well, we first plan to have some kind of feedback to the computer so that it can tell when the machine it is controlling has done what it is supposed to do. For example, assume that we have some kind of sensor which will send one pulse per wheel revolution to the computer. One revolution will mean that the wheel has traversed a distance of 2 pi r inches where r is radius of the wheel in inches. When the computer sends a signal for the robot to move forward, it will be getting back a distance measurement pulse from the wheel monitoring sensor. The computer can count these pulses to determine distance. You might even have a pulse generated for each quarter turn of the wheels. The computer memory is used when you load it with software instructions that tell it the number of pulses for each segment of the path. The computer will be constantly checking against this number with the direct input of pulses from the wheel sensors.
There still could be some difficulties with this type of control system. The wheel could slip, indicating distance traveled, even though the robot didn't move. And what about when the robot is turning? If you assume one wheel is a pivot for the turning motion, then you can quickly see that the wheel might rotate even though it is going nowhere. You have to think about the turning problem and plan for it. The slipping problem cannot be solved using wheel sensors.
MORE ON THE MICROWAVE MOTION DETECTOR-SENSOR
Consider the use of a device such as the Microwave Motion Detector made by Solfan. AHMAD, a robot made by computer technician Donald Dixon of San Jose, California, is purported to be able to monitor a children's room. If they try to leave that room, the robot tells them not to, and if the robot encounters a prowler it will tell the prowler to go back. This robot is also programmed to accept and deliver messages.
Our robot, when equipped with the radar motion sensor-detector, can respond in a variety of ways to anything moving in its field of view. Since the radar unit is normally designed to activate a relay it would require a little change to activate a verbal questioning unit, cause a light to come on, or cause a loud barking to sound (from a tape). If someone responds and the voice is not recognized by the robot's speech identification circuits, a siren might sound or lights might flash with a horrifying intensity.
There are good speech recognition and speech synthesis circuits currently on the market, and more are being developed and these will certainly be used in robotic applications. The limit of what kind of talk might be possible with speech-recognition and speech-generating circuits is limited only by a person's imagination.