As already indicated in the preliminary discussion of phase, the subject is involved with angles and various characteristics of angles. And, as we shall see later, the study of angles leads to triangles and some study in trigonometry (trig). This SECTION reviews the pertinent data from geometry and trig that may be necessary in working with vectors and phase in practical applications.
ANGLES
An angle is formed whenever two straight lines meet at a point. This point is called the vertex of the angle, and the lines are referred to as the sides. Several such angles are shown in Fig. 2-1. The angles may be lettered, numbered, or identified in some other way, especially if two or more angles enter into a given problem. In the previous SECTION, 0 ( θ) was used to indicate the phase angle in an AC circuit. This designation is used quite often. The Greek letter 0 (Phi) is also used, as well as several other letters from the Greek alphabet. An angle could be lettered as angle A, 0, or 4), numbered as angle 1, or three letters could be used as in Fig. 2-1. Here each of the angles can be referred to as angle ABC. The middle letter usually indicates the letter at the vertex of the angle.
In the previous SECTION is was considered that a full cycle of AC occupies 360° of angular position. This comes from the fact that a complete circle includes 360° of angular rotation, which value was an arbitrary choice. It is said that the circle was divided into 360 equal parts several thousand years ago when the basic year was considered to consist of 360 days. In subdividing the circle, that number of days was merely used for the number of subdivisions, called degrees.
Referring again to Fig. 2-1, notice that the angle in Fig. 2-1A is quite small as compared to the other two. This is an acute angle, a term used for any angle less than 90°. Fig. 2-1B shows a right angle, consisting of exactly 90°, or one-fourth of a circle. An obtuse angle is shown in Fig. 2-1C, and this term is applied to any angle greater than 90°. An angle of 180° is called a straight angle, and it represents the condition of two vector quantities in direct opposition to each other.
When working with vectors and phase we can consider that angles can be generated by rotating a line about a vertex which becomes the center of a circle. Each time a line is rotated one complete revolution it has covered a full circle (or cycle), or 360*. It should be stressed that every circle contains 360°, no matter how large the circle may be. Also, the number of degrees in any angle depends only on the relative directions of the lines forming that angle, not on the lengths of the lines. For example, suppose we assume that the acute angle (Fig. 2-1A) includes 30°. This angle is still 30°, even if the lengths of the lines are shortened or lengthened. And for any angle, the sides are separated by greater distances as the point of measurement is moved out from the vertex, although the number of degrees in the angle remains the same.
(A) Acute angle. (B) Right angle. (C) Obtuse angle.
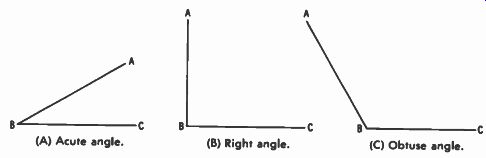
Fig. 2-1. Three different angles.
Fig. 2-2 is still used to illustrate some additional ideas regarding rotation of lines and generation of angles. The angle is shown in what is known as standard position, with one side on the horizontal axis. Zero degrees is also standardized and is shown, on the horizontal axis and to the right. The radius line (R) can be considered to be a vector since it has the fundamental characteristics of one. It expresses magnitude (length) and is drawn at some specific angle (direction).
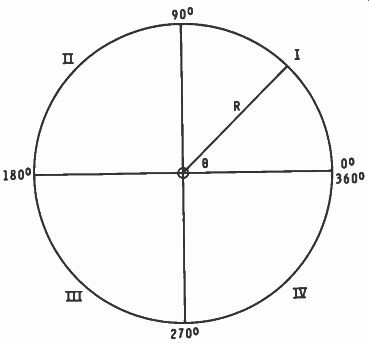
Fig. 2-2. Illustrating rotation of lines and generation of angles.
The vector line can be rotated in either direction, but conventional notation assumes that counterclockwise rotation is positive; clockwise rotation is negative. And unless otherwise specified, we can normally assume positive rotation for the generation of angles, as was done in marking the angles in...Fig. 2-2. For example, the 90° angle is one-quarter of a rotation from the zero-degree reference line. With negative rotation of 270° (actually -270°) the vector would be at the same location as if it had rotated 90° in the positive direction.
These may be referred to as counterpart angles, and the sum of their numerical values (neglecting the signs) is 360°. For example, 135° has the same vector location as -225°, the only difference being that opposite rotations were used to arrive at the angle. And as a check, 135° + 225° totals 360°. Rotation can be more than 360°; for example, a rotation of 720° would include two complete revolutions.
The Roman numerals in Fig. 2-2 show the standard numbering of quadrants, the conventional name for quarter-circles (or 90°). These are also numbered with reference to positive (CCW) rotation. The first quadrant extends from 0° to 90°, and the second quadrant from 90° to 180°. Third-quadrant angles range from 180° to 270°, and from 270° to 360° are fourth-quadrant angles. An angle is considered to be in the f quadrant in which the generator vector lies. A 60° angle would ' be in first quadrant, 135° in the second quadrant, 230° in the third quadrant, etc., using these as examples. Be careful with negative angles, however, for example -45° is in the fourth quadrant (not the first) because the quadrants are always numbered for positive rotation.
In the production of sine waves a vector is assumed to rotate continuously around the circle. For other vector applications, however, it may be assumed that the vector is stationary at some particular angle. Or, in the case of rotating vectors we may be interested in some specific angle in a given problem. In discussing angles there are several other terms which are used to some extent and which should be learned.
Two angles are said to be complementary when their sum is 90°. Thus, 35° and 55° are complementary, and each can be said to be the complement of the other. Two angles are supplementary when their sum is 180°. Thus, 120° and 60° are supplementary and each is the supplement of the other.
Counterpart angles have already been mentioned; their sum is 360° and each is the counterpart of the other.
UNITS OF MEASUREMENT
It has been mentioned that a circle can be divided into 360°, with each degree representing a specific amount of angle.
Quite often, however, it is necessary to express angles in smaller dimensions, and this involves subdividing each degree into smaller units of angle. Two systems are in general use.
What might be termed the older of the two systems divides each degree into 60 minutes and each minute into 60 seconds, thus dividing each degree into 60 times 60, or 3,600 subdivisions.
This is referred to as the sexagesimal system because it is based on sixes. In this system, for example, an angle may be expressed as 42° 35' 10", read as 42 degrees, 35 minutes, and 10 seconds.
The decitrig system is being used to a greater extent all the time, and in electronics it is used more than the sexagesimal system. This method of subdivision is based on the decimal system and divides each degree into tenths, or even hundredths or thousandths if necessary. Thus, an angle may be expressed as 38.72° in the decitrig system. This would be read as 38 and 72 hundredths of degrees. In the calculations in this guide whole-number degrees will be considered in all the example and practice problems. This may not always be true, however, in practical work, and it may be necessary to convert from one system of subdivision to the other.
In making these conversions several things should be kept in mind. Whole numbers of degrees are the same in both systems, and conversion is required only for the fractional parts of the angles. There are 60 minutes in each degree, meaning that for every tenth of a degree there are 6 minutes. To convert from decimal portions of degrees to minutes, multiply by 60, as in these examples.
0.6° = 0.6 x 60 = 36'
0.32° = 0.32 x 60 = 19.2'
To convert fractional parts of minutes to seconds (as in the previous example) multiply by 60.
0.2' =0.2 x 60 = 12" so, 19.2' = 19' 12"
To convert from minutes to degrees divide by 60 as in this example.
42 42' = e = 0.7°
To convert from seconds to minutes also divide by 60, for example:
48" = - 48 = 0.8'
60 42' 48" = 42.8'
42.8' = 4:: = 0.71° (rounded off) therefore, 42' 48" = 0.71°
Another unit for measuring angles is the radian, which is the basic unit in what might be called circular, or pi, measurement. It is based on the relationship between the radius (R), which is half the diameter (D), and the circumference of the circle. The circumference is the circular distance around the outer edge of the circle, and the relationship is expressed by: C = pi D = 2 pi it An angle of one radian is formed when the arc (part of the circle) between the two sides of the angle has a dimension equal to the radius of the circle. This is illustrated in Fig. 2-3 where θ is one radian of an angle. There are 2 pi radians in a complete circle (360°) because the circumference is 2 pi times the radius.
Numerically one radian is equal to approximately 57.3°. These conversion formulas can be used to change degrees to radians, or vice versa: radians = x degrees 180 degrees = 180 x radians pi

Fig. 2-3. An angle of one radian.
These examples show how these formulas can be used.
1. Convert 210° to radians.
radians = lr X 210 = 7 pi 180
2. Convert -3- pi radians to degrees. 2 degrees = 180 x 77. = 270° pi 2 This circular, or pi, system is especially meaningful in determining angular velocity, hence the reactance of a coil or a capacitor. In covering a full circle a vector rotates through an angle of 2r (approximately 6.28) radians. The number of revolutions made per second is a function of the frequency (f)
expressed in cycles per second. Therefore 2 pi is the angular velocity of a vector expressed in radians per second. Because it occurs so often in electronics calculations, the Greek letter Omega (w) is often used in place of 2 pi As used in the reactance formulas:
XL = 2 pi fL = coL 1 1 2 pi fC
TRIG FUNCTIONS
The study of trigonometry (trig) is concerned with the relationships of sides and angles in a triangle, which is any figure bounded by three sides which are straight lines. The trig functions express the numerical relationships of any two sides of a right triangle, which is any triangle containing one right (90°) angle. And in such a triangle the sum of the other two angles is 90° so that they are complementary.
In defining the trig functions the triangle in Fig. 2-4 should be used. 0 is the phase angle, 0 is the side opposite that angle, A is the side adjacent to it, and H is the hypotenuse, or diagonal, of the triangle. The three functions most often used are as follows: sin 0= o H cos 0= A I - E - 1 tan 0 = o These are abbreviations of sine, cosine, and tangent, respectively, and each of these has a reciprocal function. These are cosecant, secant, and cotangent, respectively. But these reciprocal functions are not used to nearly the extent of the other three, and consequently they are not considered here.
It should be stressed that these functions are ratios of the lengths of sides and are different for each angle. For example, the sine of 30° is 0.5. This means that for any size triangle the side opposite the 30° angle is one-half the length of the hypotenuse. This is true for any lengths of lines, as long as the angle is 30°. The idea holds similarly for the other functions-they are ratios, determined by the angle, not by the actual lengths of the sides.
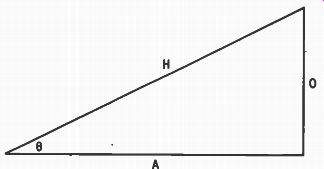
Fig. 2-4. Right triangle used in defining trig functions.
Trig tables usually give sine, cosine, and tangent values for any angle from 0° to 90°. A set of deci-trig tables is included in an appendix of this guide. Sines and cosines are listed together; tangents and cotangents are listed together. To determine the sine of an angle, locate the angle in the left-hand column and then read the value of the function under the proper heading of the tenths columns. For cosines, use the degree listings in the right-hand column, then read the cosine in the proper tenths column. Notice that for cosines the tenths are listed at the bottom of the columns, not at the top as for sines. Also notice that the angle markings for cosines progress upward, the tenths progress toward the left. The tables for tangents and cotangents are read similarly although the cotangent section may not be used so often.
Other trig tables may be arranged differently but the basic idea remains the same. Once the arrangement is understood, it is easy to see how other tables are made up and how to use them. You may check these examples to see whether or not your use of the tables is correct.
sin 21° = .3584
sin 38.5° = .6225
sin 64.3° = .9011
cos 16.5° = .9588
cos 39.7° = .7694 cos 54.2° = .5850 tan 24.8° = .4621 tan 72.4° = 3.152 tan 87.3° = 21.2 cot 21.4° = 2.552
These tables can be arranged this way because co-functions of complementary angles are equal. Thus, one set of tables can be used for both a function and its co-function. As an example, notice that the sine of 34° is the same value as the cosine of 56°. And this holds true for any angles; a function of any angle is equal to the co-function of 90° minus that angle. For vector analysis of AC circuits the sine function is used more often than any of the others. Notice that the sine starts at zero for 0° and progresses to 1 for 90°. It can never have a value greater than 1.
Sometimes in working with trig the value of a function may be known but not the angle. These are referred to as arc functions. For example:
sin 30° = .5
arc sin .5 = 30°
The basic process is the same as in determining trig functions, except in reverse. In determining arc sin .3502 locate .3502 in the body of the table and read the angle on the same line in the left-hand column. Then read the number of tenths at the top of the column in which .3502 occurs. The same procedure is used for arc cosine or any of the other trig functions.
For arc cosine, however, be careful to read the angle in the right-hand column and the tenths along the bottom of the tables. For example: arc cos .9018 = 25.6° arc cos .6401 = 50.2° Arc sin may also be written sin - both having exactly the same meaning. Similarly arc cos may be written cos -', or arc tan as tan -j. Both terminologies should be understood because both are in general use.
SOLUTION OF TRIANGLES
Probably one of the best tools for solution of right triangles is based on the Pythagorean relationship:
H2 02 ± A2
The lettering is the same as that used in Fig. 2-4, and the relationship literally states that the square of the hypotenuse is equal to the sum of the squares of the other two sides. Suppose that in a given right triangle the 0 side were 3 inches long and the A side 4 inches. The H side could be calculated by:
H2 = 02 + A2 H= V 02+A2= V 3 2+ 4 2= V-Z= 5 inches
Or, if necessary, the basic formula could be rearranged to solve for 0 or A. θ = A2 A = v H2 02
The Pythagorean theorem, however, does not take the angles into account-only the lengths of the sides. It is assumed though that one angle is 90° because the formula does not hold for any except right triangles. In later SECTIONs considerable use of this relationship will be made. Other solutions of tri angles involve combinations of lengths of sides and trig functions, because the Pythagorean relationship can be used only when the lengths of two sides are known. Then the third side can be determined. To find the number of degrees in any of the angles (except the 90° one) trig must be used.
For the triangle just solved, angle θ can be determined from any two of the side lengths by using arc functions and reading to the closest tenth of a degree.
3 θ = arc sin - 5 = 36.9°
θ = arc cos - 4 = 36.9°
5 θ = arc tan = 36.9° 4
The other angle is the complement of 36.9° so it is 90° - 36.9°, or 53.1°. Or it too could be determined by arc functions, remembering that for that angle the opposite side is the same as the adjacent side of 0, and vice versa. In cases where an angle and one side are known, a trig function can be used to determine another of the sides. For example, if θ is 35°, and the opposite side is 6 units in length, the hypotenuse can be solved by using the sine function.
θ sin θ = - H 6 sin 35° = 6 .5736 = H - 5736 - 10.46 units .
Then the adjacent side can be determined by the Pythagorean theorem or by using the cosine or the tangent function.
Or, we could have used the tangent function and solved for A first.
tan 0= - 4D A tan 35' = - 6 A
.7002 = - 6 A 6 A = .7002 - 8.57 units
Notice that for every problem there are several possibilities which can be used. And, if given a choice, the Pythagorean relationship is better because it does not require a trig table.
But, as previously stated, two side lengths must be known. In using the trig functions, the choice is determined by what is given. For example, in the previous problem we could not solve for the cosine first because neither A nor H were known. It was necessary to start with a function which included 0, either sine or tangent. If neither of the smaller angles is given, one of the arc functions can be used, as shown previously, to determine one of the angles.
THE CO-ORDINATE SYSTEM
The idea of dividing the circle into four equal sectors (quad rants) was introduced earlier in this SECTION along with the numbering of the quadrants. It was also shown (Fig. 2-2) that the quadrant numbering is based on counterclockwise rotation beginning with the zero-degree reference on the horizontal and to the right. When working with angular quantities it is necessary to divide the quadrants into smaller divisions, both horizontally and vertically, for additional accuracy. Such a system of laying out the quadrants is known as the co-ordinate system. This enables us to set up all three sides of a triangle on the same surface.
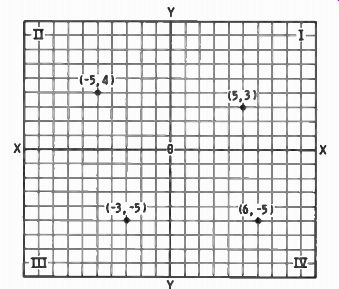
Fig. 2-5. Plot of rectangular co-ordinates.
So far we have described rotating vectors as moving about a circle, but actually there are no circumference limitations involved. So co-ordinates normally involve a square or rectangular surface subdivided into small segments each of which is a square. These are called rectangular co-ordinates and must include both positive and negative areas because both polarities occur in practical situations. Or, as we shall see later, the same surface can be calibrated in degrees with radii extending out from the center of the surface. This is polar graph paper. Both types are used because a vector can be expressed in terms of its rectangular co-ordinates in two dimensions, or in polar (or diagonal) form at some specific angle. Vectors could also be in three dimensions, but they do not concern us in this coverage.
To plot rectangular co-ordinates the cross-hatched paper is laid out as shown in Fig. 2-5. The 0 at the center is called the origin, and all measurements on the paper are expressed with reference to it. The horizontal axis is called the X axis, and the vertical axis is the Y axis. To the right of the Y axis the numbers are considered to be positive. Negative numbers are on the left of the Y axis. Also, above the X axis the numbers are positive, below it they are negative. The origin is zero in both directions.
In order to locate a point on the graph, two dimensions are involved. First, the point is a particular number of units to the right or to the left of the Y axis; this is the X dimension. The point is a particular number of units above or below the X axis; this is the Y dimension. In every case the horizontal dimension is specified first and referred to as X on the graph even though it may represent some other quantity, for example resistance, in a given problem. In every case the vertical dimension is referred to as Y on the graph, even though it also may represent some other quantity, for example reactance. Thus, (5,3) represents a specific point on the graph. It is 5 units to the right of the Y axis and 3 units above the X axis, as has been shown in Fig. 2-5.
Notice that the horizontal distance is measured with respect to the vertical axis; also, the vertical distance is measured with respect to the horizontal axis. Remember that this may eliminate one possible point of confusion. Also notice that each of the axes has a value of zero in one dimension all along its entire length. For example, for plotting in the horizontal dimension the Y axis is zero for its entire length.
Three other points are also plotted on the rectangular co ordinates of Fig. 2-5, one in each of the other quadrants. The point (-5,4) in the second quadrant is located 5 units to the left of zero and 4 units up from the reference. Any point in the second quadrant has a negative value for X and a positive value for Y. For third-quadrant points both X and Y are negative in every case as shown in Fig. 2-5, where the point (-3, -5) is shown. In the fourth quadrant the X value is always positive, and the Y value negative. Point (6,-5) is shown in Fig. 2-5.
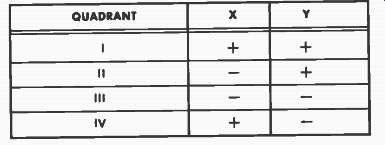
Table 2-1 Polarity of Points in Each Quadrant
The polarities (positive or negative) are very important in plotting graphic data, also in evaluating trig functions in all the quadrants. In every case the signs indicate the quadrant in which a point is located, and for ready reference Table 2-1 has been included. However, after working with the subject for even a short time, the polarities will be evident without having to refer to a table.
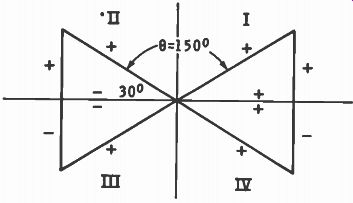
Fig. 2-6. Illustrating which sides of the triangle in each quadrant are negative
and which are positive.
Using these ideas of polarity and those previously learned for trig functions, we can determine the functions for angles greater than 90°. Previously we considered the lengths of all three sides to be positive, and this is the case in most trig calculations when only the absolute values (without polarity) are considered. The triangle can be assumed to be in the first quadrant with θ less than 90°. However, vectors can exist in any direction of rotation, so they can appear in any one of the four quadrants. This means that we must be able to consider angles greater than 90° in our trig calculations.
Although on first thought we may consider the functions of angles greater than 90° to be quite different from those of angles under 90°, that is not the case. The ranges of values are the same, except that some of the values are negative since the sides involved also have negative values. We can use the same trig tables as used for functions of angles under 90°. In the first quadrant all the sides of a triangle have positive values, so all the trig functions are also positive. And we must consider that the hypotenuse is positive in all the quadrants because it is laid out diagonally with respect to the origin.
Therefore we cannot conceive of it having a negative value. The opposite and adjacent sides, however, are still either positive or negative, depending on the actual quadrant. Fig. 2-6 shows which sides are positive and which are negative.
Still using Fig. 2-6, consider the functions of 150°, a second quadrant angle, as shown. Numerically the functions of 150° are the same as those for 30° (except for polarity of cosine and tangent). So 30° could be considered as the working angle. For any angle in the second quadrant the working angle is 180° minus the angle in question (150° in our example). Thus, we have the following:
sin 150° = +.5000 cos 150° = -.8660 tan 150° = -.5774
Except for polarity signs, the functions are those of the working angle. To see why these changes come about let's assume values so that H = 2, 0 = 1, and A = - Va. , therefore:
sin 150° = - 1 = .5000 2 cos 150° = = -.8660 2 1 tan 150° = v ---.5774
Any angle in the second quadrant has a positive sine, and negative cosine and tangent. And this also holds true for the reciprocal functions; cosecant is positive, secant and cotangent are both negative. However, as previously stated, these functions are not used nearly as much as the other three.
For angles in the third quadrant the idea is similar except that the working angle is θ minus 180°. For example, in Fig. 2-7 an angle of 210° is considered. The working angle is 210° - 180°, or 30°, and the sides could have values as shown.
Notice that both the opposite and adjacent sides are negative in ...
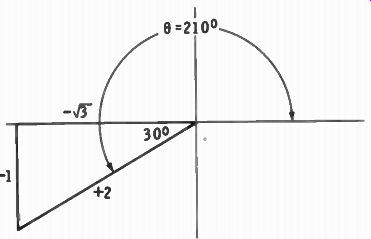
Fig. 2-7. A 210° angle value, while the hypotenuse is positive. So the functions
of 210° are as follows: sin 210° = - - 21 = -.5000
- V 3 cos 210° = = -.8660 2
-1 tan 210° = _ = +.5774
- 3
Notice that the sine and cosine are negative and that the tangent is positive. This is true for all angles which terminate in the third quadrant. Now let's look at one more example, this one an angle in the fourth quadrant, say 330°. This is shown in Fig. 2-8 and the working angle is 360° minus 0, or in this case 30°. The side lengths have the polarities shown.
sin 330° = - 21 = -.5000 cos 330° = 3 L- 2- - = +.8660 2
-1 tan 330° - - -.5774 Nra
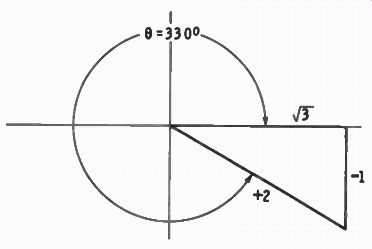
Fig. 2-8. A 330° angle.
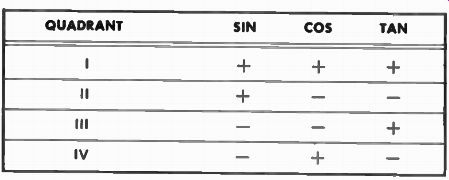
Table 2-2 --- Polarity of Trig Functions in Each Quadrant
For simplification all the working angles in the examples were 30°, but the idea holds for any angles. Table 2-2 gives the polarity for the three trig functions in all four quadrants and can be used for ready reference. However, by understanding how the signs are determined we have a means of determining the correct sign in case the information is not readily available.
Notice that the sine function is positive in the first and second quadrants and negative in the third and fourth quadrants. This agrees with the characteristic of a sine wave shown previously, that the positive alternation (0° to 180°) is positive, and the negative alternation (180° to 360°) is negative.
Notice that each function has two quadrants in which it is negative and two in which it is positive. This causes no problems when determining the values of trig functions, but it does for arc functions. For example, what is the arc sin .5? This could be either 30° or 150°, depending on the quadrant. In most cases, however, the first-quadrant angle is the one considered but a point of confusion could arise in a problem in which both answers could be used.
QUIZ
1. What is the complement of 12°?
2. What is the supplement of 75°?
3. What is the counterpart angle of 110°?
4. Convert 32° 18' to an angle in the decitrig system.
5. Convert 43.7° to degrees and minutes.
6. Convert an angle of 15° 10' 42" to an angle in the decitrig system.
7. An angle has a magnitude of 3 pi / 2 radians. How many degrees does this represent?
8. Convert 240° to radians.
9. Evaluate these trig functions: sin 31.8°, cos 15.7°, and tan 39.3°.
10. Evaluate these trig functions: sin 72.3°, cos 68.6°, and tan 76.0°.
11. Determine these arc functions: arc sin .6455, arc cos. 8878, arc tan .2180.
12. Determine these arc functions: sin^-1 .8738, cos^ -1 .1219, tan -1 2.872.
13. A right triangle has short-side lengths of 3 and 6 feet. What is the length of the hypotenuse?
14. In the same right triangle, what are the magnitudes of the two smaller angles?
15. In a right triangle θ is 38° and the side opposite it is 12 units in length. What are the lengths of the other two sides?
16. The hypotenuse of a right triangle is 8 feet long and the base angle is 56°. What are the lengths of the other two sides?
17. A right triangle has side lengths of 5, 9, and 10.3 units. What are the magnitudes of the angles?
18. Determine these functions: sin 220°, cos 310°, tan 125°.
19. Determine these functions: sin 105°, cos 238°, tan 265°.
20. What is the arc cosine of .3420? List two answers.