AMAZON multi-meters discounts AMAZON oscilloscope discounts
 QUESTIONS
QUESTIONS
- Identify four types of robots by their coordinate systems.
- Explain an advantage and a disadvantage of a continuous-path robot.
- Explain the advantage of using XYZ control for a robot program.
- Why are computer numerical control (CNC) systems discussed with robot systems?
- Discuss the advantages and disadvantages between electric, hydraulic, and pneumatic robots.
TRUE or FALSE
- Stop blocks are used with pneumatic cylinders to provide an intermediate stop when a cylinder is extended.
- Robots need a special electronic circuit called an input module to accept a current-source signal, a current-sink signal, or a 120 volt AC signal.
- The input signal to the robot is isolated by stop blocks so that they don't damage the robot bus.
- Robot output signals provide isolation between the robot and the output signal user with optoelectronic devices.
- Input and output circuits in modern robots are mounted in modules to make them easier to remove and replace when they are suspected of being faulty.
AMAZON multi-meters discounts AMAZON oscilloscope discounts
MULTIPLE CHOICE

- Robots may use as actuators
____.
- dc motors
- ac motors
- hydraulic actuators
- pneumatic actuators
- all the above
- only a and b
- A teach pendant allows
a technician to ____.
- jog the robot.
- make program changes.
- determine if dc motor brushes are bad.
- all the above.
- only a and b.
- Stop blocks are
used with a pneumatic arm on a robot to ______.
- protect output devices from transient voltages.
- provide intermediate stops for a pneumatic cylinder.
- provide an emergency stop function for pneumatic robots.
- The PLC
provides an ideal interface between multiple robots in a work
cell because ______.
- the PLC program is a continuous-scan program and the robot program is sequential.
- the PLC has input and output modules and most robots don't .
- the PLC can handle both ac and dc signals and most robots can't .
- all the above.
- The robot cabinet
provides a location to mount .
- amplifiers for the actuators.
- input and output modules for input and output signals.
- power supplies for amplifiers, motors, and I/O signals.
- all the above.
PROBLEMS
- Sketch a typical DC amplifier for a dc robot motor and explain how all of the parts of the amplifier operate.
- Sketch a typical AC amplifier for an ac robot motor and explain how all of the parts of the amplifier operate.
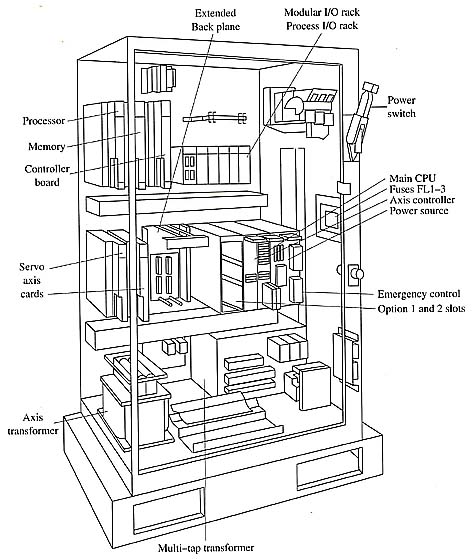
- Use the diagram of the robot cabinet in this figure and list all the main parts included in the cabinet and explain their functions.
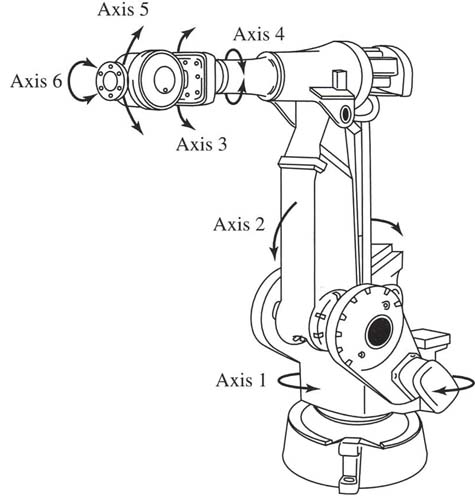
- Use the robot in this diagram and identify its basic parts and explain the function of each.
- Sketch the following circuits for output signals from robots: current source, current sink, and 120 volt AC signal.
- Sketch the following circuits for input signals to the robot and explain the current flow: a current-source circuit, a current-sink circuit, and a circuit for a 120 volt AC signal.
- Use this diagram and explain how the
position feedback loop is used with the velocity feedback loop to move
the robot axis at the correct speed to the correct location.
{kind=link}
{kind=link}
{kind=link}
| Top of Page | PREV: Industrial Robotics: In-The-Field Job Assignment | NEXT: |