AMAZON multi-meters discounts AMAZON oscilloscope discounts
This section is a summary of simple filter circuits, most of which have already been described earlier in the guide. It is intended as a guide to designing filters for use in conjunction with some of the projects in this guide, or with other circuits.
The precision of a filter depends mainly on the precision of the resistors and capacitors used in its construction. Often the capacitors are the limiting factor because it is not easy to obtain high-tolerance capacitors in a wide range of values. The precision of the filter is determined by the tolerance of the least precise component, so there is no point in using 1% tolerance resistors if the capacitors are only 10% tolerance.
Choosing Capacitors
1. Silvered mica capacitors have the highest tolerance (±1%, except for the very smallest values) but the maximum value commonly available is only 4.7nF. They have good temperature stability too, another factor to be taken into account if the circuit is to operate over a wide temperature range.
2. Close tolerance polystyrene capacitors (±1%) are available in capacitances up to 22nF, and also have good temperature stability. They are very suitable for filters.
3. Ceramic capacitors are of 3 main types. Metallized ceramic plate capacitors have good tolerance (±2%) and temperature stability in values up to about 330pF. Resin-dipped ceramics have reasonable tolerance (±5% up to 220pF). They are also available in values up to 470nF but with lower tolerance (±10% or ±20%). Disc ceramics have very poor tolerance, -20% to +80% making them quite unsuited to filtering circuits.
4. Polyester capacitors are the most sensible choice when a capacitor of larger value is required. They are manufactured in a full range of values up to about 2.2 uF. Their tolerance is relatively low (±5% or ±10%) and their temperature stability is poor, but they are adequate for very many filtering purposes. Generally the polyester layer type is to be preferred and, with these, the higher values have better tolerance than the lower values.
5. Electrolytic capacitors have a tolerance of ±20% or worse and their capacity is subject to change with age and with the degree of use. This and the fact that they are polarised makes electrolytic capacitors unsuitable for use in filters. However, a limited range of non-polarised electrolytic capacitors is available, intended for use in loudspeaker cross-over networks and these can be used in filters where high capacitance (1.5 uF to 100 uF) is essential and low precision is acceptable.
6. Tantalum capacitors are unsuitable for the same reasons as electrolytic capacitors.

Fig. 89. Low-pass and high-pass passive RC filters.
Designing Filters A: Passive RC Filters
These are the easiest and cheapest to build, but suffer from the disadvantages of low input impedance, high output impedance, reduction in signal amplitude and low Q. The resistor and capacitor values shown in Figure 89 are for a low-pass or a high-pass filter with cut-off at 1kHz. This is based on the equation:
fc = 1/2 pi RC
Since the factor 1/ 2 pi comes into the equations of almost all filters, it is convenient to replace it in the equation with its numerical equivalent:
fc = 0.16 /RC
This equation applies to many types of filter. Although the value of the dividend in the equation above works out more precisely to 0.1592, the given value 0.16 is correct within ±1%, which is close enough for most practical purposes.
The roll-off in the stop-band is -6dB per octave for the first-order low-pass filter and +6dB per octave for the first-order high-pass filter. The second-order filters have roll-offs of -12dB and +12dB per octave respectively.
The phase lag Phi of a first-order low-pass filter is -45° at the cut-off frequency V_c, less (approaching 0°) at lower frequencies and more (approaching -90°) at higher frequencies.
For a second-order low-pass filter, Phi = -90° at f_c, less at lower frequencies and more (approaching -180°) at higher frequencies. For the high-pass filters the phase lead at /c is the same as the lag for low-pass filters, but increases with lower frequencies and decreases with higher frequencies.
Design procedure: Decide on a capacitor value, one that is easily obtainable; usually it is preferable to pick a lower value rather than a high one, so that use may be made of the higher-tolerance silvered mica or polystyrene capacitors. Calculate the resistance required using this version of the equation above:
R = 0.16/C/c
If this equation produces a resistor value that is very high (above 100 k-O), very low (below 470 ohm) or difficult to obtain, try again with another capacitance.
Design example: Design a close-tolerance low-pass filter with cut-off point at 66kHz. A 1 nF (1000pF) capacitor is available in the silvered mica range, with ±1% tolerance.
R = 0.16/(1 x 10^9 x 66 x 10^3) = 2424 ohm
The closest value is 2.4 k-O, in the E24 range. Choose a resistor with ±1% tolerance.
A passive band-pass filter is made by following a low-pass filter with an overlapping high-pass filter. By overlapping we mean that the cut-off frequency of the low-pass filter is above the cut-off frequency of the high-pass filter. This gives a flat-topped pass-band, with relatively wide bandwidth. For a narrower pass-band (higher Q) an active filter must be used.
See Section D, below.
Designing Filters B: Low-pass Active Filters
The simplest low-pass second-order active filter uses a transistor in the emitter follower mode (Fig. 90). The cut-off frequency is given by 0.16/RC, as above, where R1 = R2 and C1 = C2. The component values in the figure are for fc = 1kHz. For other frequencies, calculate values as in the design example above. Roll-off in the stop band for this and the other second-order filters is -12dB per octave. Phase-change is -90° at /c, ranging from 0° to -180° for lower and higher frequencies respectively.

Fig. 90
The low-pass second-order filter based on an operational amplifier has the same features but with the ability to control damping (and hence Q) more precisely. This allows us to design filters with a particular response, such as Butterworth, Bessel and Chebyshev (page 51). With R1 = R2 and C1 = C2, damping is controlled by varying the amount of feedback, i.e. by varying the gain A of the amplifier:
R3 + R4 A = R4
The damping factor d equals 3-A. In the example shown, A = (39ka + 22 k-O)/39 k-O = 1.6. This makes d = 3 - 1.6 = 1.4. A damping factor of 1.41 produces the Butterworth response. For a Butterworth filter, no further calculations are required, except that in a higher-order filter the total gain of the filter must be apportioned between the sections, by adjusting the values of the feedback resistors. How to do this is explained below.
In Bessel and Chebyshev filters it is necessary to adjust the values of the filtering resistors too, to take into account the fact that, for these filters, the equation for calculating fc is not exactly the same as given above. This involves using a normalizing factor/n, as explained later.
Designing procedure (2nd-order Butterworth): Decide on a capacitor value as explained in the previous design procedure.
This value applies to both capacitors. Calculate the resistance, using R = 0.16/C/c. This value applies to both filtering resistors. Using the Butterworth damping factor d = 1.41, calculate the required gain, A = 3--d--1.59. Calculate suitable values for the damping resistors by first selecting a value for R4, then calculating a value of R3 to produce the required amplification:
R3 = R4(A -1) It is important that, whatever changes are made, the amplification is not allowed to approach 3. To do so makes d very small and conversely makes Q very large. Under these circumstances the circuit is very sensitive to variations in component values. Having a large value of Q, it is liable to go into continuous oscillation.
Design example: Design a 2nd-order active low-pass filter with Butterworth response and cut-off point at 50Hz.
Obviously a fairly large capacitance is required. As a first trial, 220nF capacitors would require resistors of R =0.16/ (220 x 10 exp 9 x 50) = 14.5 k-O. Polyester layer capacitors of 220nF have ±5% tolerance, so 15 k-O resistors would be close enough. The Butterworth damping factor is d- 1.41. Therefore A = 3 - 1.41 = 1.59. Decide on 39 k-O for R4, then R3 = R4 (1.59--1) = R4 x 0.59 = 39k-O x 0.59 = 23.01 k-O. A 24 k-O is the nearest E24 value, but the more readily available 22k-O resistor could equally well be used when only ±5% tolerance is provided by the capacitor.
Design procedure (2nd-order Bessel): Decide on a capacitor value as explained in the previous design procedure. This value applies to both capacitors. Calculate the resistance, using R = 0.16/C/c. Then divide this by the normalizing factor,
/n = 1.27. This value applies to both filtering resistors.
Using the Bessel damping factor d = 1.73, calculate the required gain, A = 3 -d = 1.27. Calculate suitable values for the damping resistors by first selecting a value for R4, then calculating a value of R3 to produce the required amplification:
R3 = R4(A -1)
Incidentally, the fact that A equals 1.27, the same value as the normalizing factor, is coincidental and applies only to the second-order Bessel filter. In other filters the two factors have different values, as will be seen in later paragraphs.
Design example: Design a 2nd-order active low-pass filter with Bessel response and cut-off point at 800Hz. 10 nF capacitors would require resistors of R = 0.16/(10 x 10 exp 9 x 800) = 20 k-O. Divide by the normalizing factor: 20 k-O/1.27 = 15.7 k-O.
A 16 k-O resistor gives precision between +1% and +3%. High-precision (±1%) polystyrene capacitors are available for 10 nF (10,000pF), so a high-precision filter could be built by using a 15.8 k-O resistor from the E96 range.
The damping factor is 1.73, so A = 1.27. Decide on 39kI2 for R4, then R3 = R4(1.27--1) = R4 x 0.27 = 39k-O x 0.27 = 10.5 k-O.
The nearest standard values are 10k-Ohm and 11 k-o, but give only ±5% precision. If ±1% precision is essential then use the 10.5 k-O value from the E96 range.
Design procedure (2nd-order Chebyshev): We confine this description to the Chebyshev filter with 2dB ripples in the pass-band. Decide on a capacitor value as explained in the previous design procedure. This value applies to both capacitors. Calculate the resistance, using R = 0.16/Cfc. Then divide this by the normalizing factor, fn = 0.91. This value applies to both filtering resistors.
Using the Chebyshev damping factor d = 0.89, calculate the required gain, A = 3-d = 2.11. Calculate suitable values for the damping resistors by first selecting a value for R4, then calculating a value of R3 to produce the required amplification:
R3 = R4(A-1)
Design example: Design a 2nd-order active low-pass filter with the 2dB ripples Chebyshev response and cut-off point at 100kHz. 100pF capacitors would require a resistor of R = 0.16/(100 x 10^12 x 100 x 10^3) = 16 k-O. Divide by the normalizing factor: 16 k-O/0.91 = 17.6 k-O. An 18 k-O resistor is the nearest standard value.
The damping factor is 0.89, so A = 2.11. Decide on 39 k-O for R4, then R3 = R4(2.11--1) = R4 x 1.11 = 39 k-O x 1.11 = 43.3 k-O.
The nearest standard value is 43 k-O.
Design procedure (4th-order Butterworth): The values shown in Figure 90 for the fourth-order filter give a Butterworth response. The cut-off frequency is calculated from the usual equation, in which R -R1 = R2 = R5 = R6, and C = C1 = C2 = C3 = C4. Decide on a capacitor value as explained in the previous design procedure. This value applies to all 4 capacitors. Calculate the resistance, using R = 0.16/C/c. This value applies to all 4 filtering resistors.
The damping factor d is 1.848 for the first section and 0.765 for the second section. This gives gains of 1.152 and 2.235 respectively, giving an overall gain of 1.152 X 2.235 = 2.6 for the whole filter. Calculate R3 and R4 to obtain a gain of 1.152, and R8 and R8 to obtain a gain of 2.235:
R3 = R4(A1--1) = R4x 0.152
R7 = R8(A2--1) = R8 x 2.235
Design example: Design a 4th-order active low-pass filter with Butterworth response and cut-off point at 5kHz. Select 10 nF as the capacitor value for both sections. R = 0.16/(10 x 10 exp 9 x 5 x 103) = 3.2 k-O. Use an E12 resistor of 3.3k-O, or a precision E96 resistor of 3.16k-O or 3.24 k-O. In the damping equations, assume that R4 = R8 = 39k-O. Then calculate R3 = 39 k-O x 0.152 = 5.9 k-O. Calculate R7 = 39kH x 1.235 = 48.2 k-O. 5.6 k-O and 47 k-O resistors would be close enough for a low-precision filter.
Design procedure (4th-order Bessel): Decide on a capacitor.
This value applies to all 4 capacitors. Calculate the resistance, using R = 0.16/C/c. Then divide this resistance by the normalization factors, which are 1.43 for the first section and 1.61 for the second section. Thus R1 = R2 = A/1.43, and R5 = R6 -A/1.61.
The damping factor d is 1.916 for the first section and 1.241 for the second section. This gives gains of 1.084 and 1.759 respectively, giving an overall gain of 1.084 x 1.759 = 1.9 for the whole filter. Calculate R3 and R4 to obtain a gain of 1.084, and R7 and R8 to obtain a gain of 1.759:
R3 = R4(AX -1) = R4 x 0.084 R7 = R8(A2 -1) = R8 x 0.759
Design example: Design a 4th-order active low-pass filter with Bessel response and cut-off point at 120kHz. Try 1 nF as the capacitor value for both sections. R- 0.16/1 x 10^9 x 120 x 10^3) = 1.333 k-O. For the first section R1 = R2 = 1.333 k-O/1.43 = 932 ohm. For the second section, R5 = R6 = 1.333 k-O/1.61 = 828H. Use the nearest values 910 ohm and 820 ohm.
In the damping equations, assume that R4 = R8 = 39 k-O.
Then calculate R3 = 39 k-O x 0.084 = 3.3kH. Calculate R7 = 39k-O x 0.759 = 29.6 k-O. 3.3 k-O and 30 k-O resistors will be satisfactory.
Design procedure (4th-order Chebyshev): This is the 2dB ripple version. Decide on a capacitor value. This value applies to all 4 capacitors. Calculate the resistance, using R =0.16/ C/c. Then divide this resistance by the normalization factors, which are 0.47 for the first section and 0.96 for the second section. Thus R1 = R2 = R/0A1, and R5 = R6 = R/0.96.
The damping factor d is 1.076 for the first section and 0.218 for the second section. This gives gains of 1.924 and 2.782 respectively, giving an overall gain of 1.924 x 2.782 = 5.4 for the whole filter. Calculate R3 and R4 to obtain a gain of 1.924, and R7 and R8 to obtain a gain of 2.782:
R3 = R4(A1 -1) = R4 x 0.924 R7 = R8(A2 -1) = R8 x 1.782
Design example: Design a 4th-order active low-pass filter with Chebyshev 2dB ripple response and cut-off point at 100Hz. Try 100nF as the capacitor value for both sections.
R = 0.16/(100 x 1CT9 x 100) = 16k .
For the first section R1 = R2 = 16 k-O/0.47 = 34 k-O. For the second section, R5 = R6 = 16 k-O/1.61 = 9.9 k-O. Use the nearest values 33 k-O and 10 k-O.
In the damping equations, assume that R4 = R8 = 39k-O.
Then calculate R3 = 39 k-O x 0.924 = 36.0 k-O. Calculate R7 = 39k-O x 1.782 = 69.5 k-O. 36k-O and 68k resistors will be satisfactory.
Designing filters with steeper cut-off: The second-order active low-pass filters have a roll-off of -12dB per octave, and the fourth-order filters have a roll-of of -24dB per octave. If steeper roll-off is required, precede the filter with one or more passive sections, with cut-off of the same frequency. For example, preceding a fourth-order active filter with a second-order passive filter increases the roll-off to -36dB per octave. This addition affects the damping of the filter as a whole and it is necessary to adjust the values of the feedback resistors in the active sections if a filter with a particular response is to be built. The simplest way of tackling this is to breadboard the feedback parts of the filter and experiment with various resistor values. In general terms, it will be necessary to reduce damping to compensate for the damping inherent in the passive filters. Try reducing the values of R3 and R7.
Designing Filters C: High-pass Active Filters
Circuits for high-pass active filters are the same as those in Figure 90 except that the filtering resistors (R1, R2, R5, R6) are exchanged with the capacitors (C1, C2, C3, C4). The response of the filter at the highest frequencies in its pass-band are limited by the frequency response of the operational amplifier.
Design procedures: The procedures are exactly the same as those for the corresponding low-pass filters except that we multiply by the normalization factor instead of dividing by it.
Design example: Design a 2nd order active high-pass filter with Bessel response and cut-off point at 800Hz. 10 nF capacitors require resistors of 0.16/(10 x 10^9 x 800) = 20 k-O. Multiply by the normalizing factor: 20 k-O x 1.27 = 25.4 k-O. A 24 k-O resistor gives reasonable precision, although with high-precision polyester capacitors it is more appropriate to use the 25.5 k-O resistor from the E96 range. The rest of the design is as on page 173.
Designing Filters D: Band-pass Active Filters
For a broad, flat-topped pass band, with fractional bandwidth greater than about 1 (see page 75) use a low-pass filter and feed its output to a high-pass filter. For a narrower pass band use a multiple feedback filter (Fig. 91).
Design procedure: Given the lower and upper -3dB points, fL and f_H, calculate the bandwidth, Af = fH--fL.
Then calculate the center frequency f0:
fo ~ y/(fL x Sh)
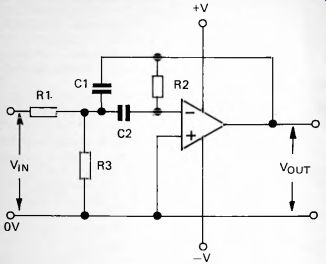
Fig. 91. Multiple feedback band-pass filter.
Finally calculate the fractional bandwidth = Af/f0. If, instead of the above parameters, we are given the center frequency f0 and Q, we calculate the fractional bandwidth from 1/Q.
From this point the procedure takes one of two directions:
(1) If the fractional bandwidth is greater than 1 (or thereabouts) design a low-pass filter with cut-off frequency fH (note the suffix!), and a high-pass filter with cut-off frequency fL. Feed the signal to the low-pass filter and then send the output of this to the high-pass filter. See pages 168-177 for further details.
(2) If the fractional bandwidth is less than 1 (high Q), design a multiple feedback filter, as follows. First decide on the voltage gain A at the center frequency, f0. This could be 1, or possibly more. Next decide on a suitable value C for the capacitors, taking into account the fact that precision is particularly important in bandpass circuits.
Calculate the value of resistor R1:
R1 = 0.159/(4/x Ax C) Calculate the value of resistor R2 :
R2 = 0.318/(A/x C)
Calculate the value of resistor R3:
R1 R3 = (39.5 x/o2 x C2x R1 x R2)-l
Note that the only expression involving f0 is the last one, indicating that, given fixed values for the capacitors and for resistors R1 and R2, the center frequency can be set by varying only R3. R3 can be replaced by a variable resistor, giving a tunable band-pass filter. Tuning has no effect on the bandwidth or gain.
Design example: Design a band-pass filter, bandwidth Af = 100Hz, center frequency /0 = 1kHz, gain A = 5. The fractional bandwidth is 1000/100 = 10, so this is a filter that requires a multiple feedback circuit.
The capacitor value is selected as 10 nF.
R1 = 0.159/(100 x 5 x 10 x 10^9) = 31.8M2 R2 = 0.318/(100 x 10 X 10^9) = 318k-O R3 =
31.8 x 10^3 (39.5 x 10002 x 100 x 10^18 x 31.8 x 10^3 x 318 x 10^3)-1
= 81712.
Suitable values are 33k-O, 330k-O, and 82017, but closer tolerance for the first two of these would be preferred.
Design procedure (4th-order band-pass filter): If a slightly wider pass band is required, combined with steep roll-off on either side, cascade two multiple feedback filters, with staggered frequencies. The Q for both filters is identical. If f0 is the required central frequency, decide on a staggering factor a and design the filters as above with the central frequency of one being (f0/a) while the central frequency of the other is (f0 x a). The larger the value of a, the flatter the top until, with increasing a, a slight dip appears at f0. In general, the value of a should range between 1.005 and 2.0.
Designing Filters E: Notch Filters
One method of obtaining a notch filter is to sum the low-pass and high-pass outputs of a state-variable filter. This is described on page 94. The circuit in Figure 92 shows a notch filter that can be built as a fixed-frequency filter or as a tunable filter. This is an improvement on the twin-T filter of Figure 46 which has low Q.
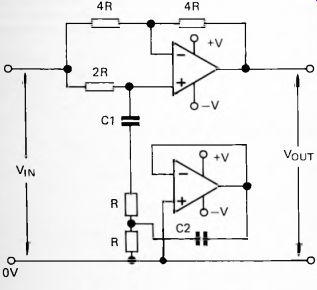
Fig. 92. High-Q notch filter.
Design procedure (high-Q notch filter): The easiest method is for the resistors to have the ratios shown in Figure 92. C1 should have a value in the range 100pF to 39nF, while C2 should be in the range 100nF to 10 uF. Thus C2 is 200-1000 times C1. Decide on suitable values of C1 and C2, bearing in mind that component tolerance is extremely important in resonant filters such as this. As a starting point, a suitable pair of values is C1 = 2.2 nF and C2 = 1 uF. Then calculate R from the equation: 0.16 R = f0V(C1 x C2)
Stray capacitance in the circuit as well as other factors may affect the center frequency, especially at frequencies of several hundred hertz or more. In this case, center frequency can be corrected by altering the resistors labeled 'R\ Increase one of them and decrease the other, keeping the total of these resistors equal to 2R. A simple way of doing this is to replace the 'R' resistors with a variable resistor of value 2R as in Figure 93.

Fig. 93. Making the notch filter tunable.
The Q of this filter, when the 'R' resistors are equal is:
Q = 1/2
When using this circuit it is usually necessary to limit the amplitude of the input signal. Otherwise the amplifiers become saturated and the output signal is badly distorted.
Design example: Design a notch filter with center frequency 100Hz. Start with C1 = 2.2nF and C2 = 1 pF. Calculate V(Cn<"C2)^= = 4.69 x 10^8.
Then R = 0.16/(100 x 4.69 x 10^-8) = 34 k-O. Use 33 k-O, 68 k-O and 130k$2 resistors for R, 2R and 4R respectively.
For highest precision use 34k-O, 68 k-O and 137 k-O from the E96 range. The Q of this filter is 10.7.
Substituting a variable resistor as in Figure 91 not only provides a means of trimming the center frequency but also makes the filter tunable. If the resistances of the two portions of the resistor are RA and RB, as in the figure, the center frequency is:
0.16 fo = __/ ( C1 x C2 x 1?A x Rb)
This equation also demonstrates that the filter may be tuned by using a variable capacitor in place of the fixed capacitor C1.
Designing Filters F: State-variable Filters
The circuit for a tunable state-variable filter was given in Project 4 (Fig. 51). This can be converted to a non-tuning version by substituting fixed-value resistors for the variable resistors.
Design procedure: Refer to Figure 51. Decide on a suitable value C for the two capacitors. Resistors R1, R2, R4, R5 and R8 are 10k-O, R3 is 2.7 k-O and R7 is 4.7 k-O.
Calculate the value R required for the fixed resistors R9 and R10 which replace VR2 and VR3 using the equation R = 0.16/6^0. Given the required value of Q, calculate the value of R6 using the equation R6 = 10 k-O x Q. Given the required gain A, calculate the value of the fixed resistor R11 to replace VR1 using the equation R11 = R6/A. If variable gain or Q are required, VR1 and VR4 can be left as in Figure 51.
Design example:
Design a state-variable filter with f0 = 400Hz, Q = 3 and A = 2. A suitable value for C1 and C2 is 100nF. R = 0.16/(100 x 10^9 x 400) = 4k-O. Since Q is to be reasonably low, then 3.9 k-O resistors can be used for R9 and R10. R6 = 10 k-O x 3 = 30k-O. R11 = 30k-O/2 = ism.
The other resistors are as listed in the design procedure.