AMAZON multi-meters discounts AMAZON oscilloscope discounts
The years 1939-45 saw the development of analog and digital computing techniques, and, towards the end of that era, the first appearance of electronic computers based on tubes and relays. Years 1948-50 saw digital computers established, using tubes and-more significantly-the development of the transistor.
Ten years later (1960), printed circuit boards first appeared, and also the first small-scale monolithic integrated circuits and hybrid integrated circuits. Transitional computer circuits took over from tubes. Medium-scale integrated circuits (MSI) appeared in 1965, and large scale integrated circuits (LSI) in 1970. Throughout this period of rapid development of ICs, aspects of digital computing were further extended, culminating in the appearance of the first micro-miniaturized computer, or microprocessor, in 1971. From that date, there has been intensive development of digital integrated circuits in micro -miniature form through DTL to TTL to MOS FET and CMOS, etc. Throughout this period, the capabilities of microprocessors have continued to be improved, with, most significant of all, a fall in prices.
Essentially, the microprocessor is a digital computer in micro-miniaturized form, but not necessarily with the full capabilities of a conventional digital computer. One of its main applications, in fact, is a Programmable Controller (PC) for various industrial applications. Within the last five years or so, upwards of 60 different PC systems have appeared, designed for industrial use, as well as others with more open capabilities.
Each is associated with its own peripheral devices and associated software (i.e., programming devices).
Originally, PCs were designed as one -bit processors, using discrete components. Today, they are invariably based on microprocessors, or, in some cases, combinations of both a microprocessor and a one-bit processor.
Some of the more recently introduced types incorporate dual -language processors based on bit-slice technology.
One of the most important features of a microprocessor is its size--not its physical size, but the length of the data word it operates on and the number of words its memory can store. Microprocessor language is measured by the number of bit per word, a bit being a binary digit. Common microprocessor word lengths are 4, 8, 12, and 16 bits.
An 8-bit data word is by far the most common, and is given a special name-a byte.
Because there are only two possible combinations for one bit, it follows that the total number of combinations possible in a binary word in a given length is 2 raised to the Nth power, where N is the number of bits in a word. Thus, for an 8-bit word, the total number of combinations is 28 - 256.
As one measure of microprocessor size is the length of its word, this reflects on the size of the memory. The memory must be able to store a given number of words of this length.
For example, a byte-oriented microprocessor with a memory that can store up to 10 words will have 80 bits of storage capacity in the memory. It is generally assumed that a 4-bit microprocessor is accompanied by a memory storing 4-bit words, and a 16-bit microprocessor with 16-bit words of memory.
It follows, therefore, that memory size is measured by the number of words it may store. Often, the IC which is referred to as a microprocessor has little or no memory; the memory for the unit is contained in other ICs.
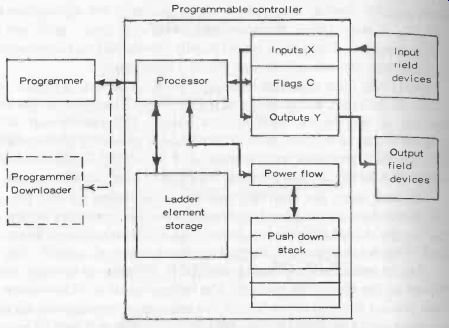
Fig. 24-1. Block diagram of Texas 510 Programmable Controller.
The maximum memory capacity of a PC system depends on the addressing capability.
But, in practice, the maximum expandability is related to the maximum physical number of inputs and outputs, and also of the complexity of control algorithms. A rule of thumb for calculating memory requirements is: 10-15 instructions (or commands) per one output on the average application for sequential control, with few arithmetic, timing, or counting functions. For applications with a more sophisticated control algorithm, 15-20 instructions per output may be required. You have to consider more memory space if several programs are to be stored simultaneously, which are selectable by a manual operation mode switch, for example, for frequently changing production at one machine.
The maximum memory capacity of PCs on the market ranges from 256 words (one word corresponds to one instruction) to 16000 words (commonly expressed as 16 K) and more.
Memory systems are modular and expandable from a minimum "starter set" of 1/4 k in increments of V4 k, 1 k, and 4 k.
In simple form, the microprocessor comprises three basic parts: the central processing unit (CPU), memory, and the I/O devices.
A microprocessor always contains a CPU, and in some instances, memory as well as an I/O device.
The CPU has the ability to send (address) information to either the memory of the I/O device (see Fig. 24-1).
Just as the memory must have an address before data may be transferred to or from it, so much the I/O devices. Normally, there is more than one input or output device on a system. Therefore, the CPU must decide which one it wishes to transfer data with, and this is done by addressing.
To execute a particular program, the programmer may set aside a certain area of the memory for program storage. Other areas of memory may be set aside for data storage, and these assignments may change for a different program. The Texas 510PC, shown in schematic form in Fig. 24-1. is one of the latest types of programmers on the market, and illustrates the position of the microprocessor within the total package which includes memory storage, location area, image register (IR) and push -down stack (PDS).
All entries to the sequencer are made with a plug-in programmer. This can read out and modify all locations within the memory storage location area. When an entry is made, it is entered into and stored within this storage area. Timers and counters as well as series and parallel logic are contained therein.
The processor controls the Model 510 PC memory during programming and execution of the user program. Logic instructions from the programmer are entered into the storage area (user memory). At the start of each program scan, the processor places the status of the instruction in the register and transfers the status of the selected output to the output (Y) lines.
I/O modules are commonly available as plug-in cards or plug -on boxes in increments of 2, 4, 8, 16, and 32 lines per module. However, 8 -stage modules and 16 -stage modules seem to be the best buy. A broad variety of I/O cards with different signal-voltage levels are available from many manufacturers. Types of I/O modules are:
5 Vdc Transistor -Transistor Logic (TTL); 24 Vdc; 48 Vdc; 120/24 Vdc; 24 Vac; 120/24 Vac, etc.
In practical application, however, preference should be given to one standard signal voltage, thus faulty I/O modules can be replaced by a spare I/O module of the same type.
Swapping I/O cards is a fast, sure, troubleshooting technique.
Where possible, control elements and I/O modules of the same signal type should be used, which means inexpensive I/O modules of the same signal type should be used, which means inexpensive stock of spare components.
The output current load per line of various output cards ranges from 0.5A to 2A, but some PCs on the market may have a problem--namely, not all outputs on a card can be energized simultaneously because the card does not have the current-carrying ability to energize all outputs at once. The maximum number of inputs/outputs per system ranges from 32 for small, 128 for medium, and up to 4096 for large systems.
However, at this point, it must be noticed that a large number of inputs/outputs, as well as corresponding large programs, may heavily reduce the response, or cycle, time of an application. The distributed systems concept may be more appropriate for a large and complex application.
Several larger PCs have some capabilities or options which allow continuous process control with algorithms built-in for standard PID (Proportional-Integral-Differential) controllers with analog inputs and outputs. The combination of logic control and analog loop control means that these PCs can be used for batch or continuous processing applications; however, they are not able to completely replace typical process -loop controllers. Usually, loop controllers are built as plug-in or plug -on modules for extended PC systems. Optional available ADC (Analog-to -Digital Converters) accept, respectively supply signals of 4-20 mA or 0-5/0-10 Vdc. The signal resolution is rather low.
Precise measurements are not possible at typically three-digit BCD (Binary Coded Decimal) value.
Counter and timer functions are indispensable tools of a PC system.
Nominally, up to 64 internal counters or timers are built into medium to large-scale PCs. The time base is generated through a quartz oscillator clock that can commonly deliver three different time standards: 0.1s, 1.0s, and 1.0 min. Three-digit cascading up-and-down counters and timers provide convenient tools for a wide range of applications. For fast counting applications, such as positioning or angle -indicating transducers, separate fast counter cards are necessary.
A critical specification for using internal counters is the counting frequency under the worst-case timing conditions, because the actual count -rate depends very much on how the program is structured; therefore, special attention must be paid to timing-related problems.